Coal mine drilling and anchoring robot and supporting method
A robot and robot body technology, applied in the installation of bolts, mining equipment, earthwork drilling, etc., can solve problems such as low support efficiency, poor working environment, and high labor intensity, and achieve easy operation, low cost, and reduced subsidence volume effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
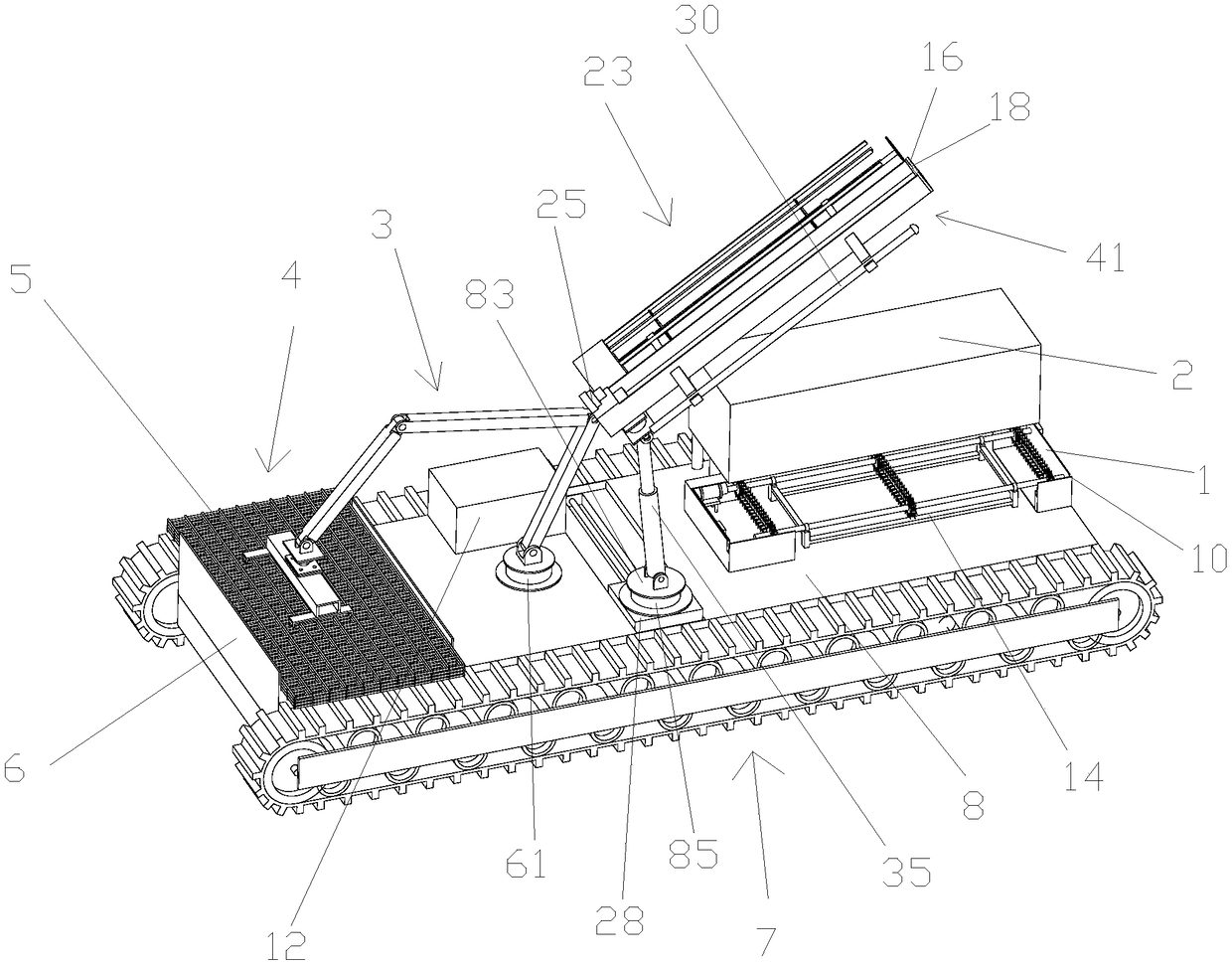
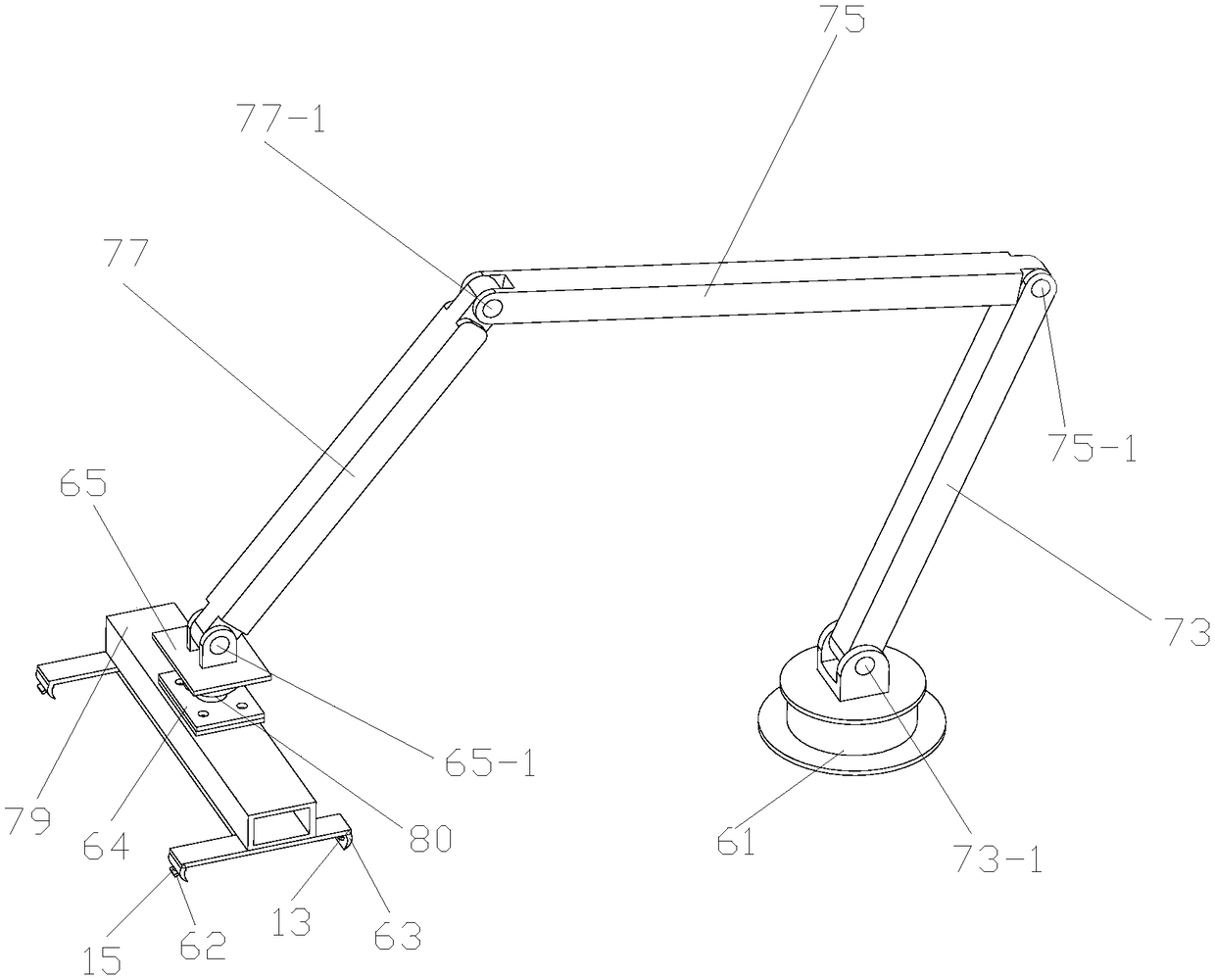
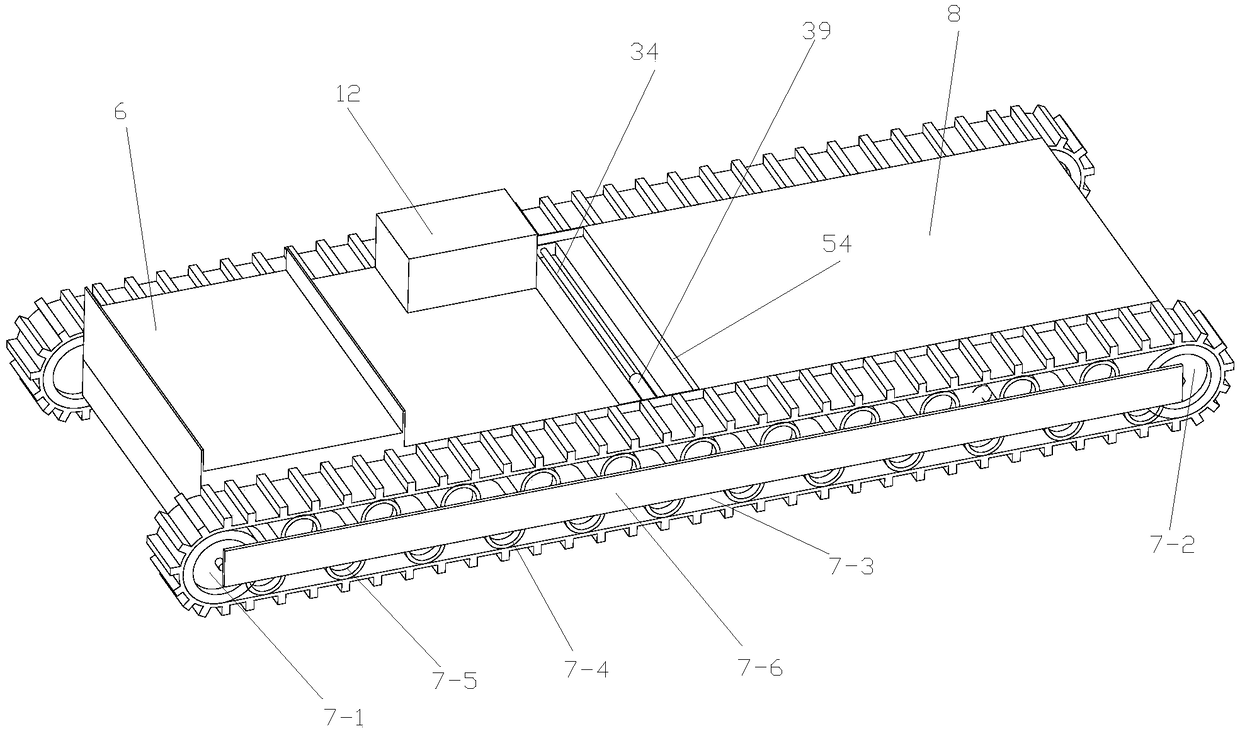
[0086] Such as figure 1 with Figure 8 A coal mine anchor drilling robot shown includes a robot body, a net distribution mechanism and a drilling and anchor device installed on the robot body, and controls the robot body, the net distribution mechanism and the drilling and anchor mechanism The control module of the robot body includes a body 8, two sets of crawler running mechanisms 7 symmetrically installed on both sides of the body 8, and a walking drive mechanism that drives the rotation of the crawler running gear 7. The body 8 is provided with support The support net storehouse 6 that net 5 is contained, and described net distribution mechanism comprises the mechanical arm mechanism 3 that is installed on the body 8 and is installed on described mechanical arm mechanism 3 ends and supports net 5 in support net storehouse 6 Grab the grabbing manipulator 4, the body 8 is provided with a sliding mechanism 31 for the sliding of the drilling and anchor mechanism;
[0087]The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com