Automatic driving high-speed manipulation and control system based on optimal control and safety distance and control method of system
A safe distance and optimal control technology, applied in the general control system, control/regulation system, adaptive control, etc., can solve the problems of driver modeling difficulties, and achieve the goal of solving modeling difficulties, fast convergence speed, and solution accuracy high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
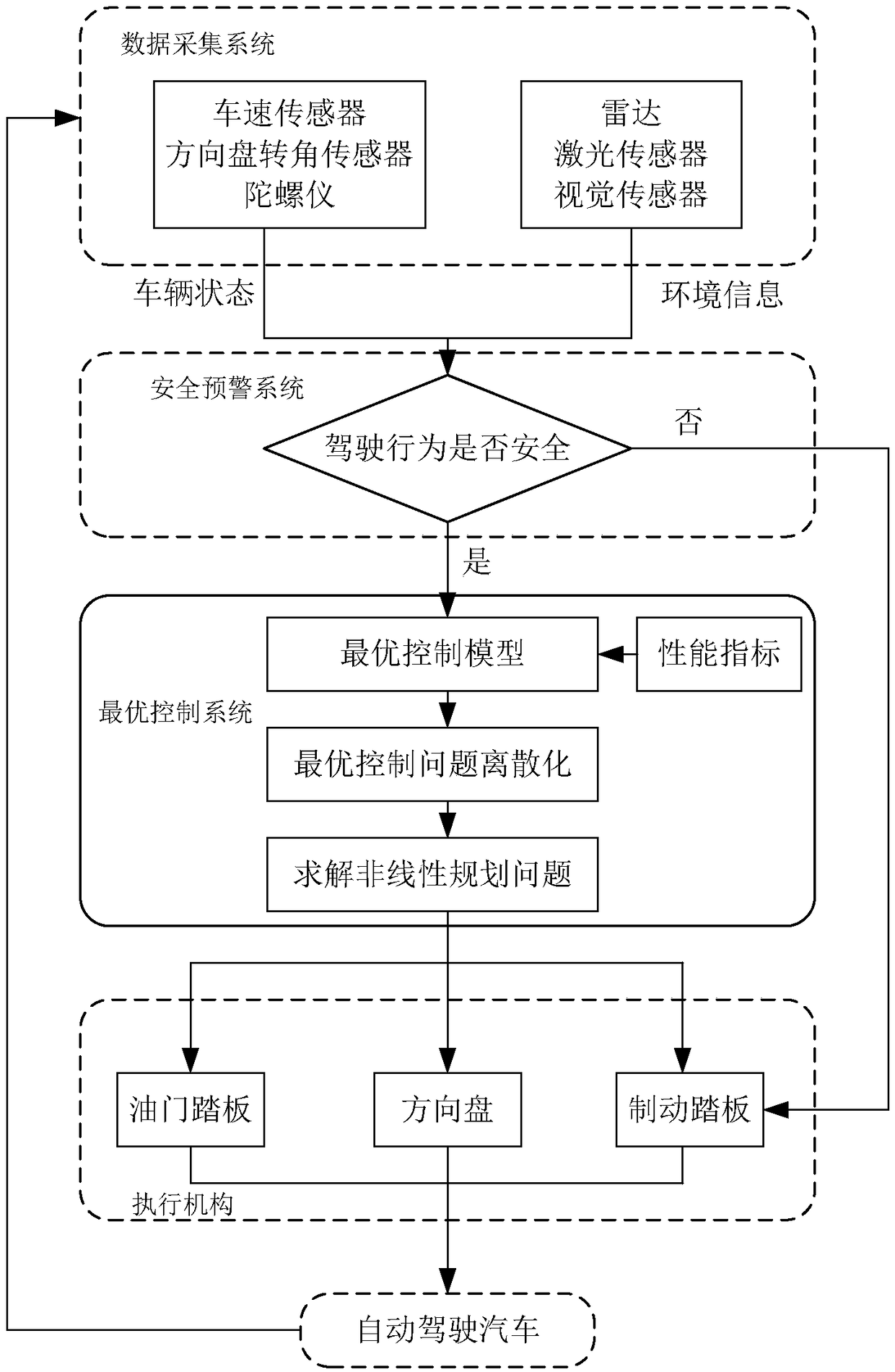
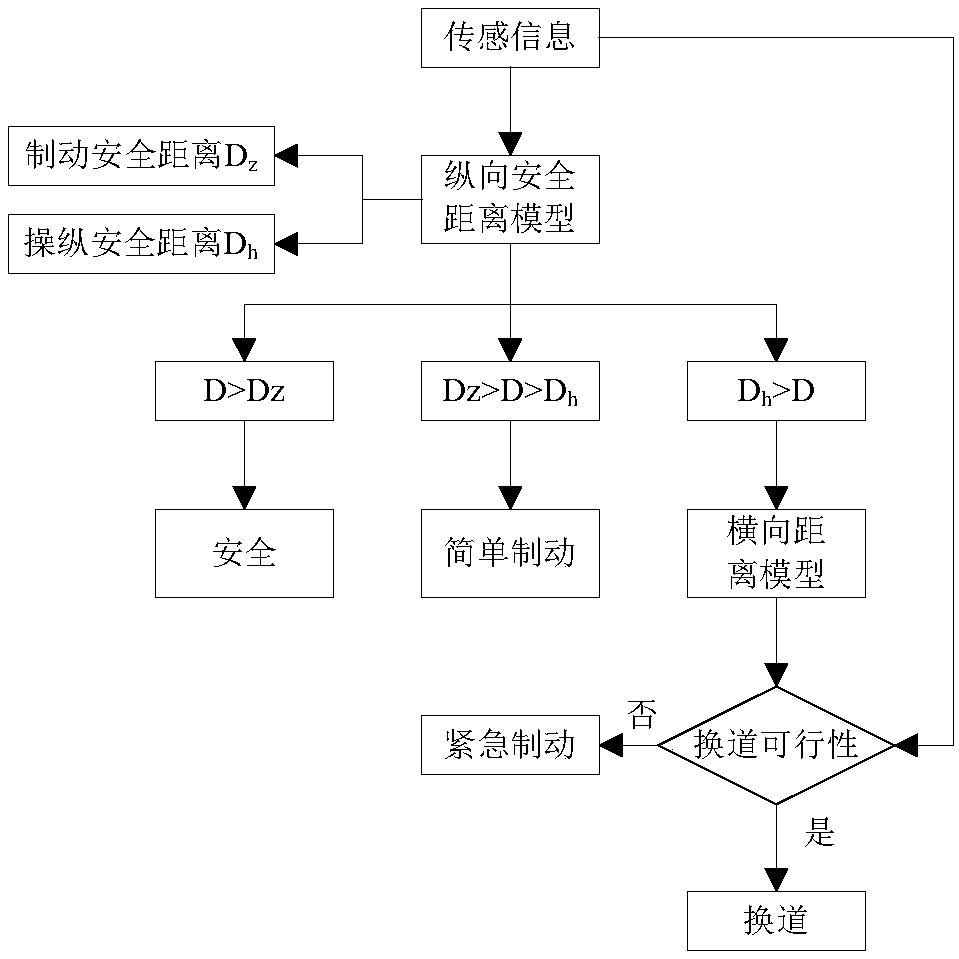
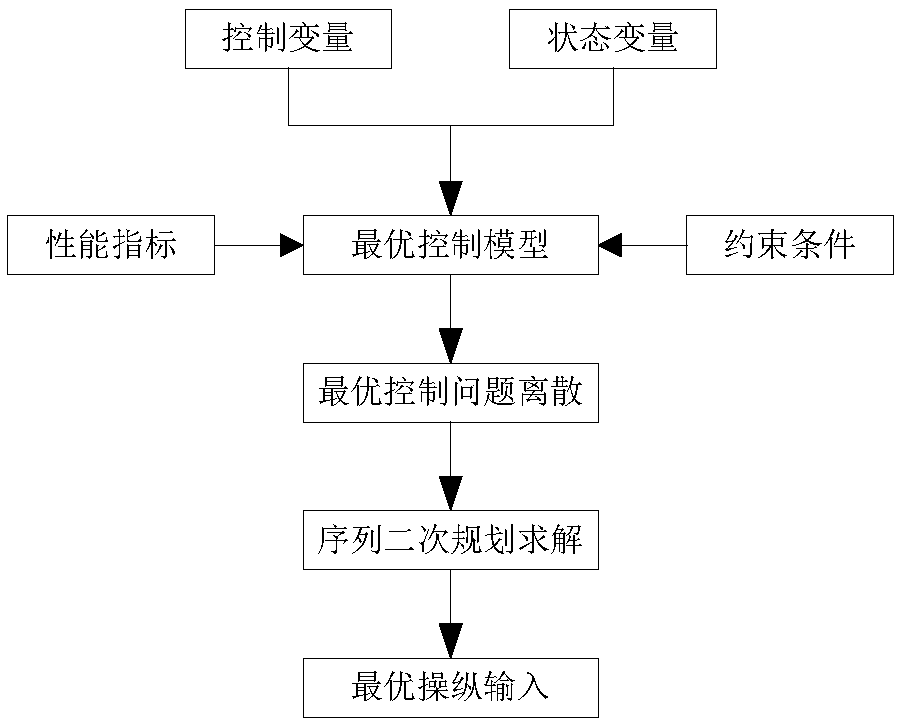
[0026] The present invention is an automatic driving fastest maneuvering control system based on optimal control and safety distance, which can formulate longitudinal and lateral control strategies by the safety early warning system according to the driving state information and surrounding environment information of the vehicle collected by the data acquisition system ; When performing lateral maneuvering, according to the optimal control theory, given the state of the vehicle before and after the lateral maneuvering, the optimal control algorithm is used to inversely find the ideal fastest maneuvering input, and control the vehicle to perform the expected lateral maneuvering.
[0027] Such as figure 1 Shown, working method of the present invention is:
[0028] Step 1: The data acquisition system collects the current driving status of the car, the lane line and obstacle position, and the driving information of surrounding vehicles, and transmits the collected information to t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com