Flexible mechanical arm experiment system and control method
A flexible robotic arm and experimental system technology, applied in the field of online monitoring motion control, can solve the problems of single experimental system, staying at the theoretical level, and unsatisfactory control algorithm experimental verification, and achieve poor applicability, convenient data analysis and post-processing Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with accompanying drawing.
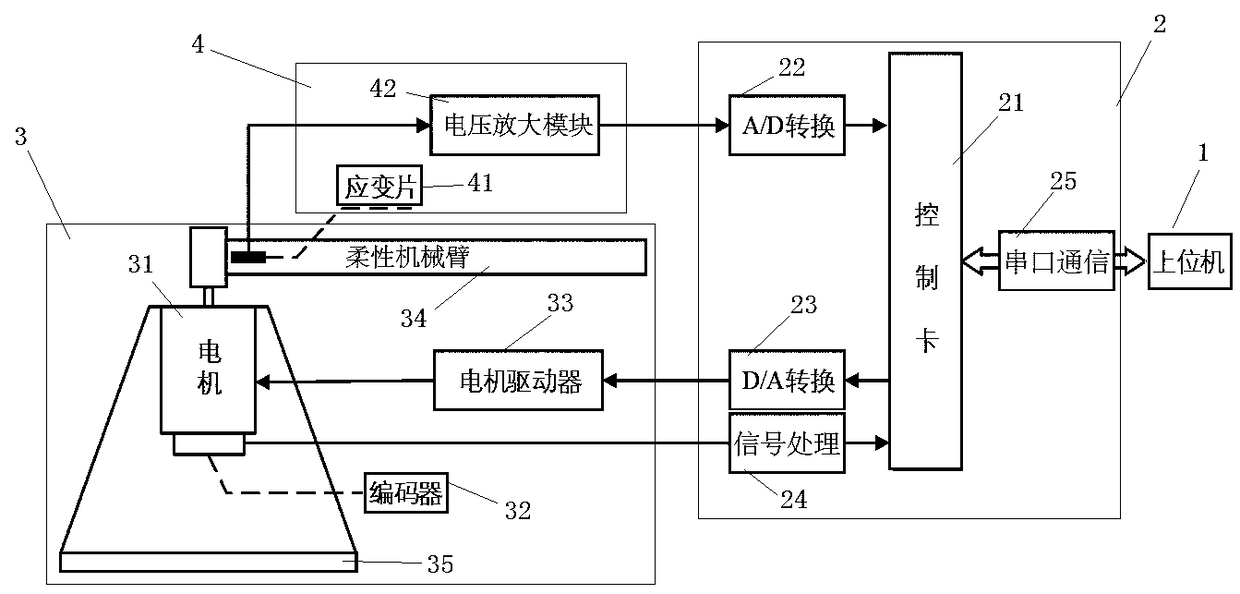
[0028] Such as figure 1 As shown, a flexible manipulator experimental system includes a main controller unit 2, and the main controller unit 2 is connected with: used to execute the control algorithm, implement and display the vibration signal of the flexible manipulator and modify the variable parameters of the control algorithm online The upper computer 1; the controlled body 3 of the flexible manipulator used to provide a power source for the flexible manipulator to be monitored; the vibration signal acquisition module 4 used to detect the vibration of the flexible manipulator and feed it back to the main controller unit.
[0029] Further, the controlled subject 3 of the flexible mechanical arm includes a flexible mechanical arm 34, and the flexible mechanical arm 34 is connected with a servo motor 31 that provides a driving force; the servo motor 31 is connected with: u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com