Quadrotor flight control method based on fractional saturation function switching control law
A flight control, fractional-order technology, applied in attitude control, non-electric variable control, control/regulation system, etc., can solve the problems of controller output jitter, affecting controller stability, controller burden, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
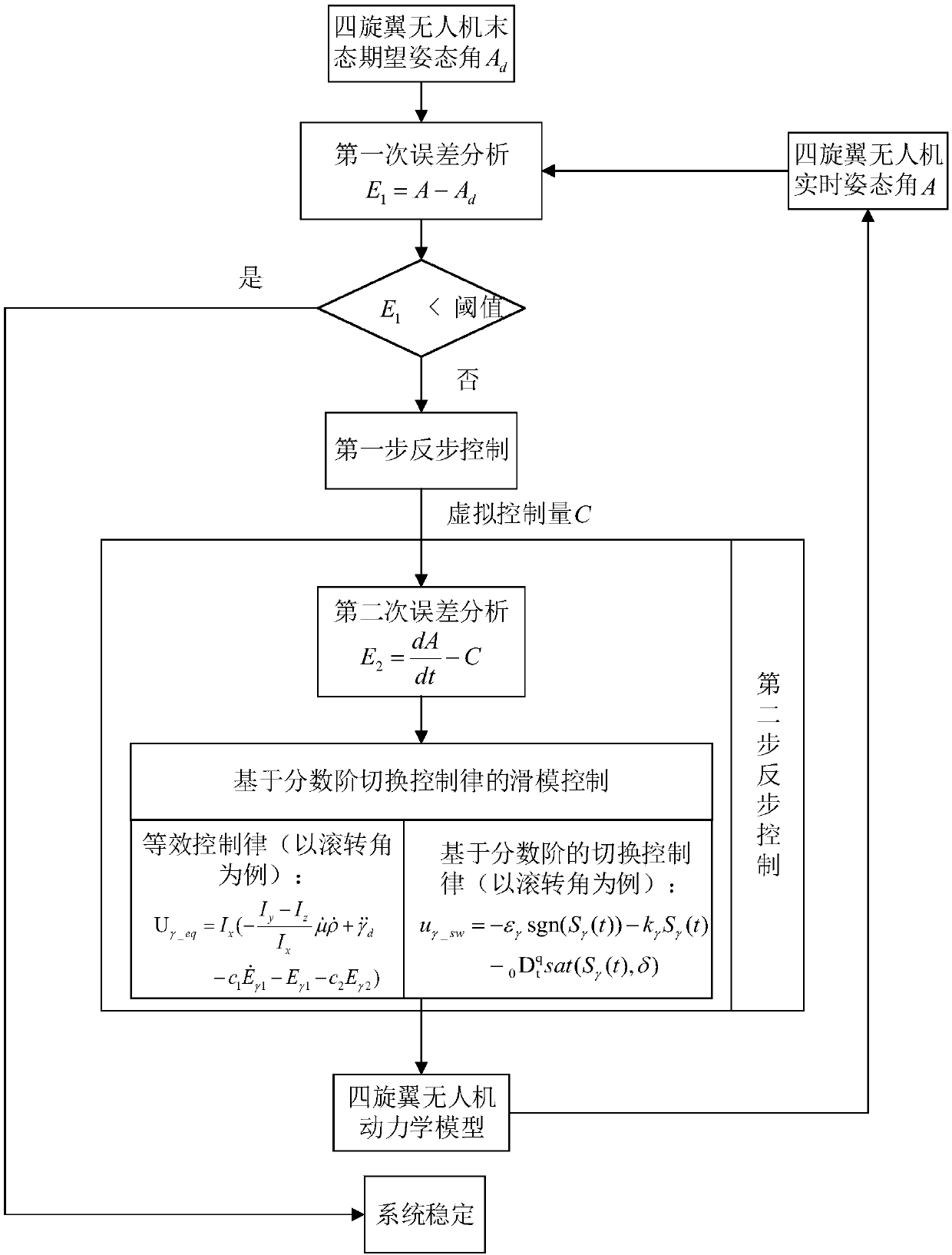
[0066] figure 1 It is a flow chart of the quadrotor flight control method based on the fractional order saturation function switching control law of the present invention.
[0067] In this example, if figure 1 As shown, the present invention proposes a four-rotor UAV flight control method based on fractional saturation function switching control law, comprising the following steps:
[0068] S1. Based on the Newton-Eulerian principle, the dynamic analysis of the UAV is carried out, including mechanical analysis and torque analysis, and the UAV dynamic model is established. The UAV dynamic model includes a translational motion model and a rotational motion model, among which the translational motion model for:
[0069]
[0070] Among them, (x, y, z) are the position coordinates of the UAV in the ground coordinate system, are the second-order derivatives of x, y, and z respectively, γ, μ, and ρ are the three attitude angles describing the UAV, namely roll angle, pitch angl...
example
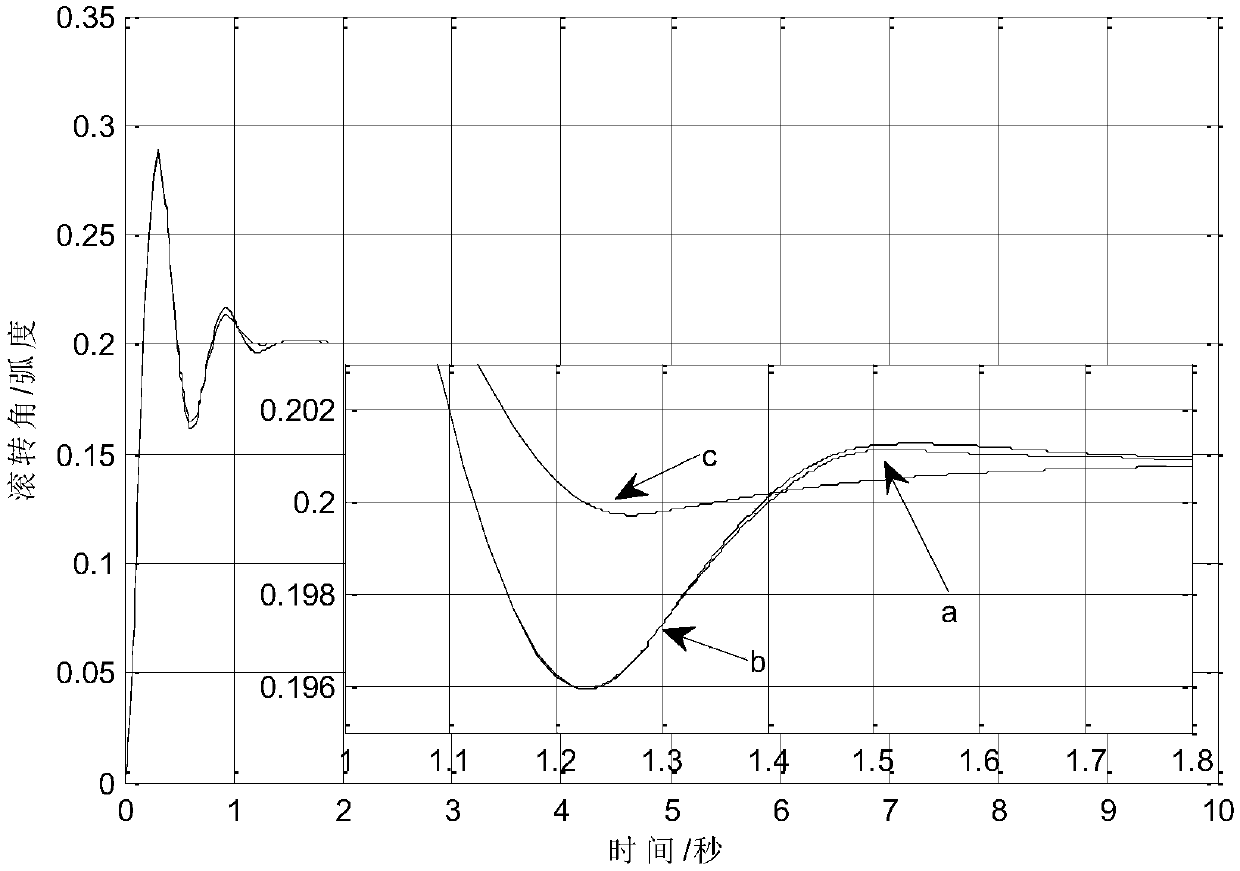
[0122] In order to more intuitively see the improvement of the performance of the flight controller after the introduction of the fractional-order saturation function switching control law, a simulation experiment is taken as an example to illustrate. In the simulation experiment, the initial values of the state quantities: altitude, roll angle, pitch angle and yaw angle are all 0, and the expected values are 8 meters, 0.2, 0.1 and 0.3 radians respectively. In the figure of the experimental results, Figure 2-5 is the state response curve, Figure 6-9 is the sliding mode surface change curve of the corresponding state, Figure 10-13 is the controller output curve for the corresponding state. In each figure, curve a——fractional order backstepping sliding mode controller (q=0.2, δ=0), curve b——fractional order saturation function backstepping sliding mode controller (q=0.2, δ=0.01) and curve c—the performance comparison of fractional-order saturated function backstepping ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com