Control method of remote operation system in discrete time state
An operating system and discrete time technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve problems such as harsh external environment, influence, network delay, etc., and achieve the effect of ensuring stability and synchronization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0051] The invention will be described in further detail below in conjunction with the accompanying drawings and examples. The following examples are used to illustrate the present invention, but cannot be used to limit the scope of the present invention.
[0052] Control method of the present invention comprises the following steps:
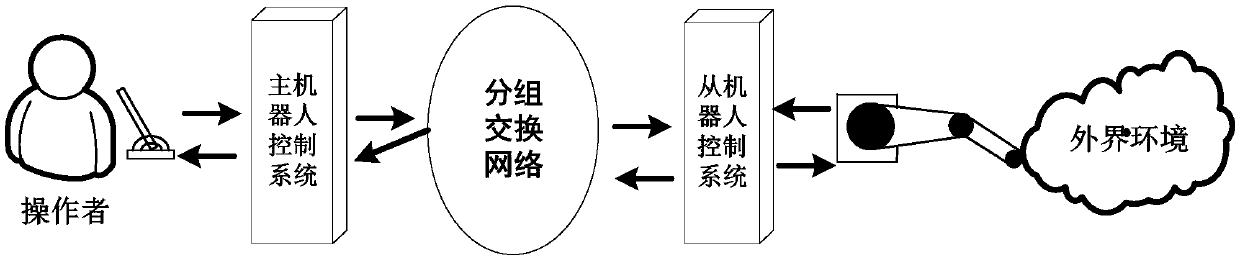
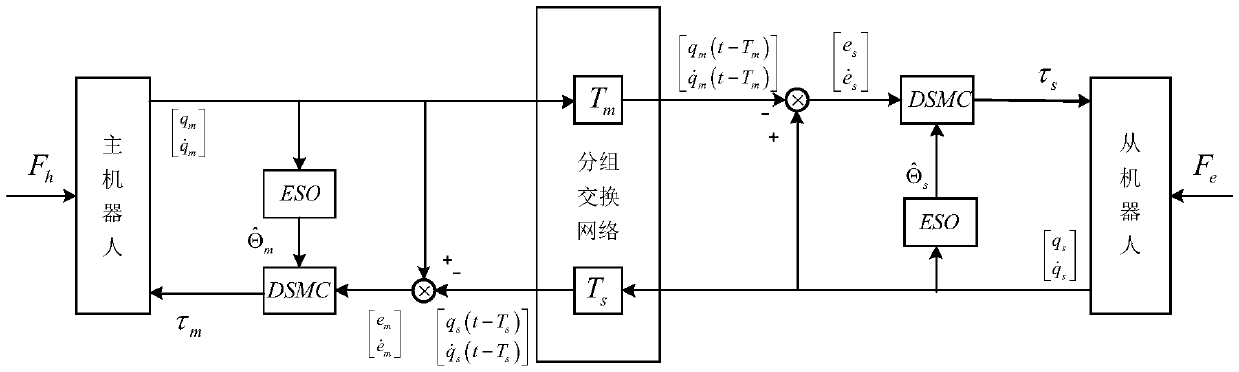
[0053] S1. Establishing a teleoperation system model in an n-dimensional discrete-time state;
[0054] In the teleoperation system, the master-slave robot has highly coupled nonlinearity, which means that the existence of system uncertainty is inevitable. In addition, most environmental systems have unavoidable external disturbances. For example, the radiation at the site of a nuclear accident will seriously affect the control performance of the slave robot. Therefore friction force, uncertainty and external interference etc. are considered in the model of the present invention, and its dynamic model is:
[0055]
[0056] Among them, the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com