


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Four-legged bionic robot with waist adopting eight-rod metamorphic mechanism, and driving method thereof
A technology of bionic robot and rod change, applied in the field of bionic robot, can solve problems such as inability to bow up and down, back up, twist waist, small robot stability margin, and inability to change shape
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0045] Embodiment 1. A quadruped bionic robot using an eight-bar metamorphic mechanism at the waist, and the eight-rod metamorphic mechanism at the waist is in a plane state.
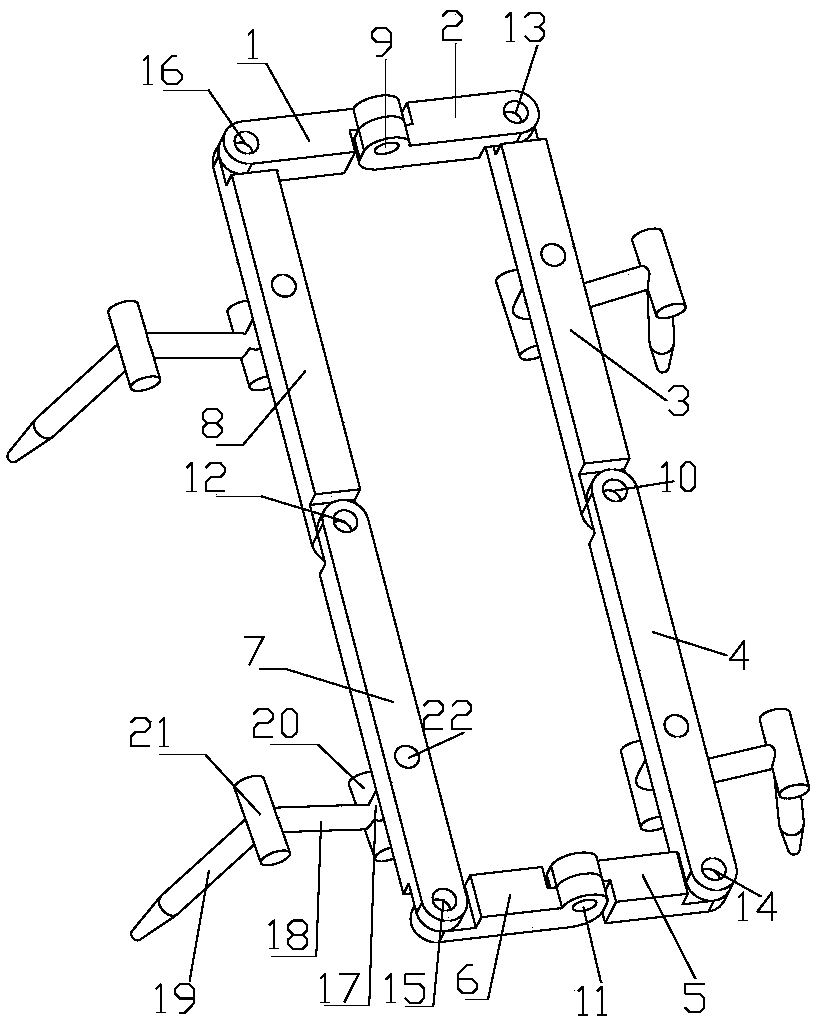
[0046] Such as image 3 , Figure 4 , Figure 5 , Figure 6 It is an embodiment of the eight-bar mechanism at the waist of the present invention in a planar configuration, including one closed chain and four open chains. The closed chain is composed of the first hinge rod 1, the second hinge rod 2, the third hinge rod 3, the fourth hinge rod 4, the fifth hinge rod 5, the sixth hinge rod 6, and the seventh hinge rod connected in sequence. An eight-bar metamorphosis mechanism formed by 7 and the eighth hinge bar 8.
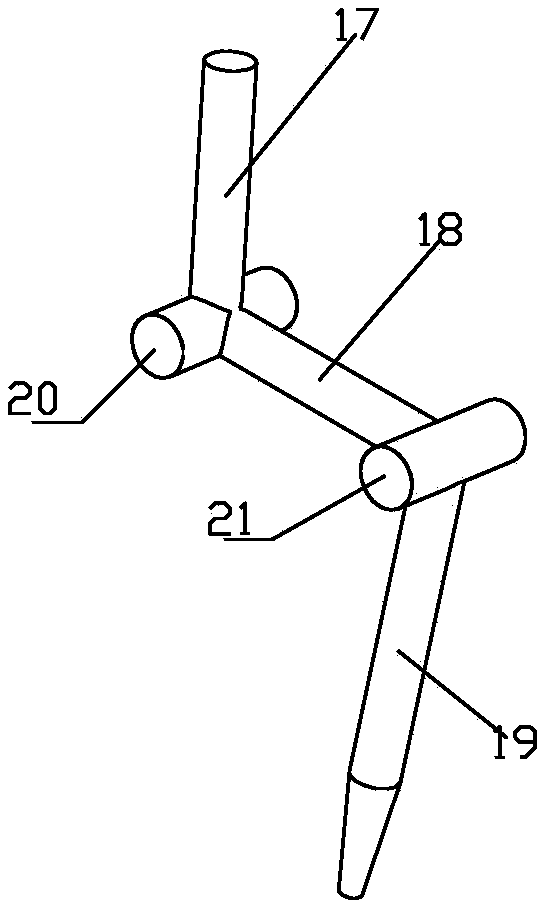
[0047] Under the driving method of this embodiment, as image 3 , Figure 4 , Figure 5 , Figure 6 As shown, the first leg bars 17 in the four open chains are respectively hinged with the seventh hinge bar 7, the eighth hinge bar 8, the third hinge bar 3 and the fourth hinge bar 4 th...
Embodiment 2
[0056] The quadruped bionic robot with an eight-bar metamorphic mechanism is used at the waist, and the eight-rod metamorphic mechanism at the waist is in a spatial configuration, which is the situation of the metamorphic quadruped bionic robot of the present invention bending over left and right. Such as Figure 7 , Figure 8 , Figure 9 It is an embodiment of the eight-bar mechanism at the waist of the present invention in a planar configuration, including one closed chain and four open chains. The closed chain is composed of the sixth hinge rod 6, the seventh hinge rod 7, the eighth hinge rod 8, the first hinge rod 1, the second hinge rod 2, the third hinge rod 3, and the fourth hinge rod connected in sequence. An eight-bar metamorphosis mechanism formed by 4 and the fifth hinge bar 5.
[0057] Such as Figure 7 , Figure 8 , Figure 9 As shown, the first leg bars 17 in the four open chains are respectively hinged with the seventh hinge bar 7, the eighth hinge bar 8, ...
Embodiment 3
[0060]Embodiment 3. A quadruped bionic robot using an eight-bar metamorphic mechanism at the waist, and the eight-bar metamorphic mechanism at the waist is in a series configuration. That is the situation in which the waist of the changed quadruped bionic robot of the present invention is folded in half.
[0061] The axis of the third hinge pair 11 coincides with the intersection of the upper surface of the sixth hinge bar 6 and the upper surface of the fifth hinge bar 5; the axis of the first hinge pair 9 coincides with the upper surface of the first hinge bar 1 and the second hinge The intersection lines of the upper surfaces of the rods 2 coincide. When the included angle between the sixth hinge bar 6 and the seventh hinge bar 7 is equal to the angle between the eighth hinge bar 8 and the first hinge bar 1, the axis of the third hinge pair 11 is collinear with the axis of the first hinge pair 9 .
[0062] exist figure 1 On the basis of driving the third hinge pair 11 to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com