Time-optimal trajectory planning method and device aiming at robot operation space
A technology of operating space and trajectory planning, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., and can solve problems such as joint overspeed, large restrictions, and reduced production efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
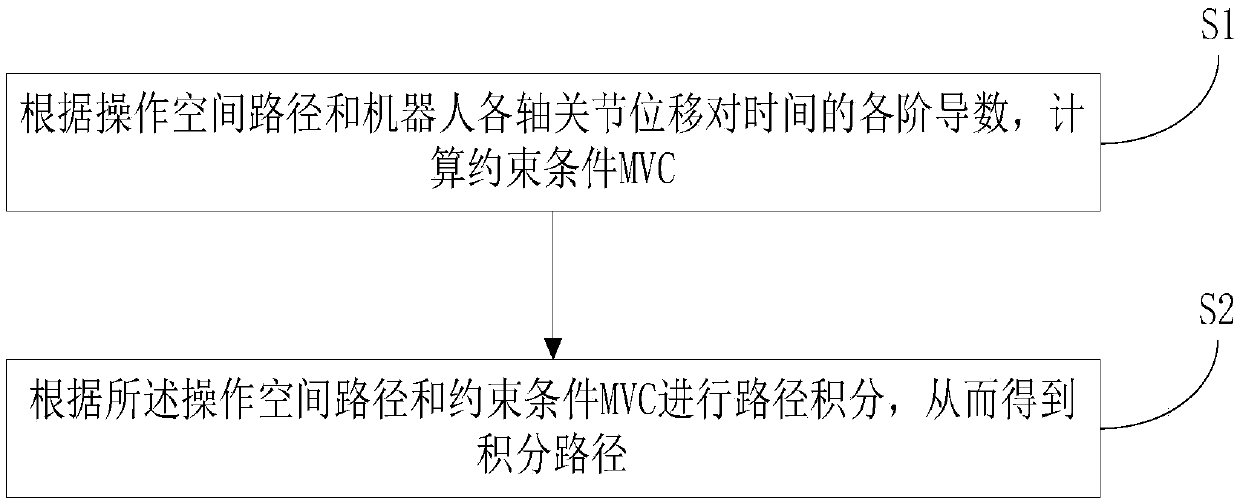
[0049] The present invention is a time optimal trajectory planning method for robot operation space, such as figure 1 shown, including the following steps:
[0050] S1. Calculate the constraint curve MVC according to the given operating space path related to the arc length parameter and the set derivatives of the joint displacements of each axis of the robot with respect to time;
[0051] S2. Perform path integration in the operation space according to the operation space path and the constraint curve MVC, and the obtained integrated path is a time-optimal trajectory planning result.
[0052] The operation space path can be expressed mathematically by f(s), where s is the arc length parameter, and the operation space path f(s) is given, which is related to the work tasks of the robot, and the joint displacement of each axis of the robot versus time The derivatives of each order are also set according to the work tasks. The derivatives of the joint displacement of each axis o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com