An omnidirectional wheel device, robot and control method thereof
An omnidirectional wheel and control signal technology, applied in the field of robotics, can solve problems such as inability to real-time sub-wheel braking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
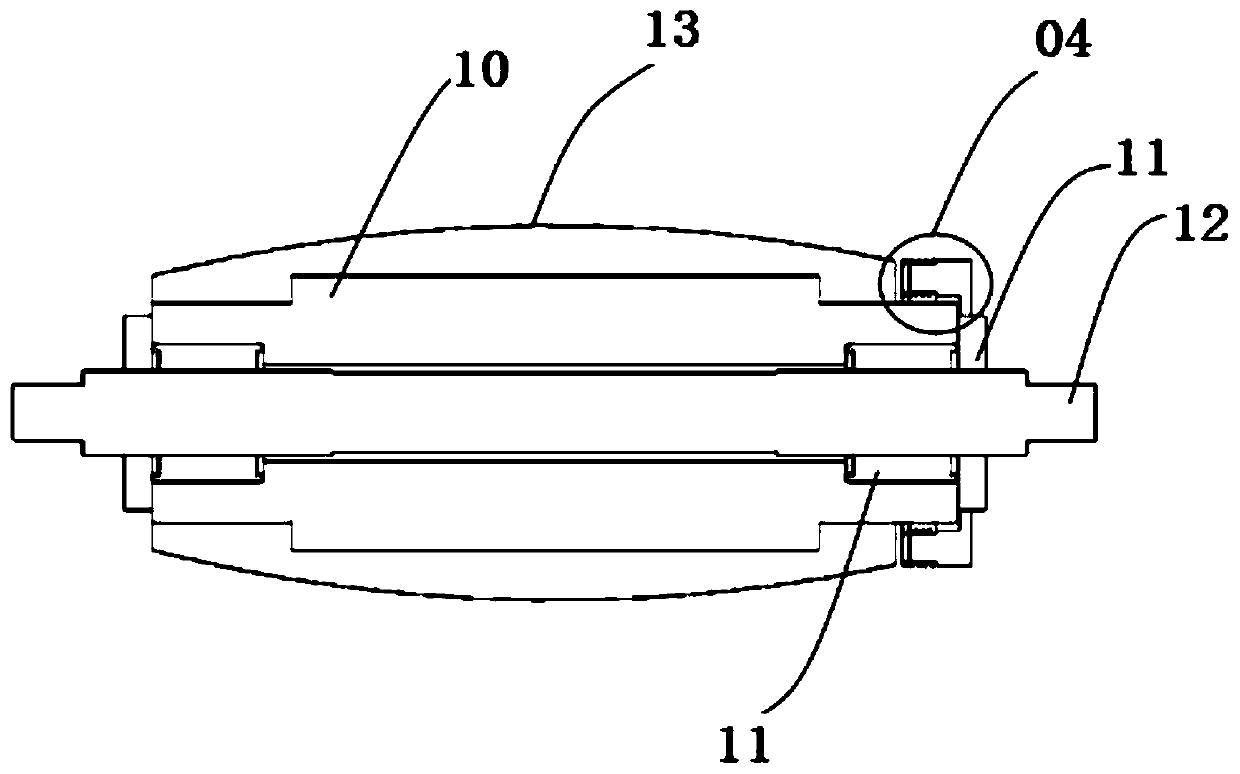
[0038] refer to figure 1 , shows a schematic structural view of an omnidirectional wheel device provided by an embodiment of the present invention. The omnidirectional wheel device may include: a main shaft 01, a center wheel (not shown in the figure), several sub-wheels 03, and a sub-wheel fixing plate 02 And conductive parts 05.
[0039] Such as figure 1 As shown, the center wheel and sub-wheel fixing plate 02 are sleeved on the main shaft 01 , and the center wheel and sub-wheel fixing plate 02 can rotate around the main shaft 01 . Several sub-wheels 03 are arranged along the outer circumference of the center wheel, and the sub-wheels 03 are connected between the two sub-wheel fixing plates 02, and each sub-wheel 03 can rotate relative to the center wheel.
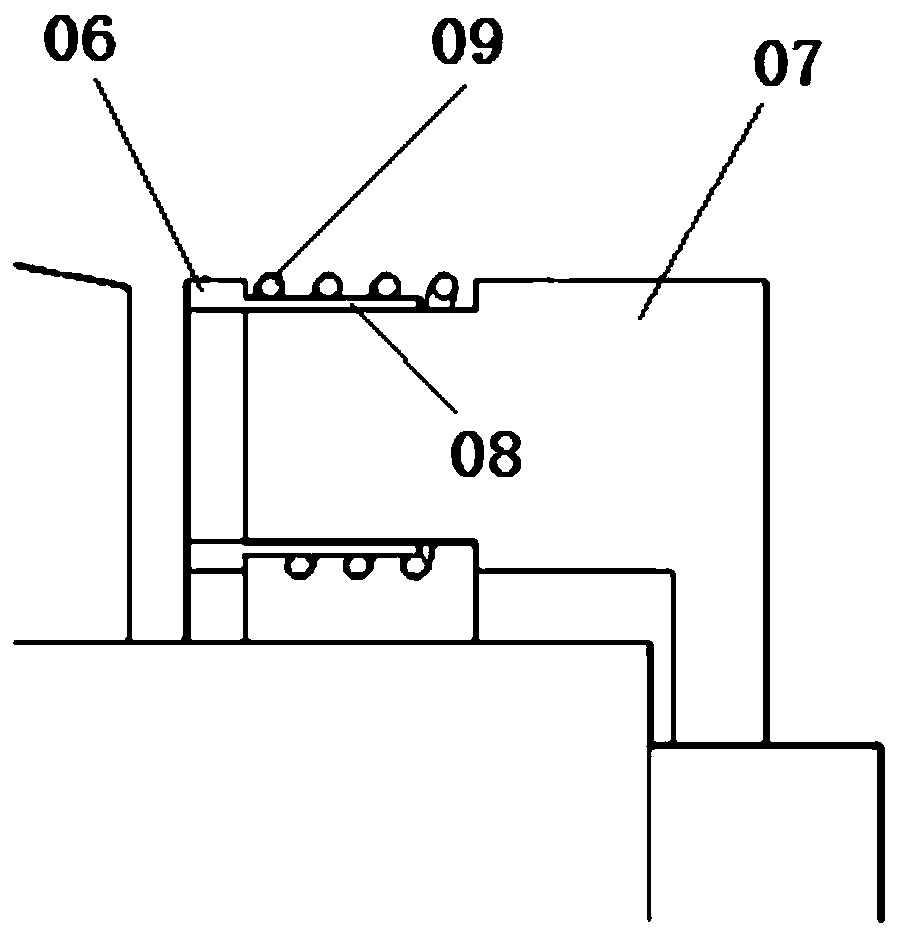
[0040] One end of the main shaft 01 is also provided with a conductive component 05, the conductive component 05 is located on the side of the sub-wheel fixing plate 02 away from the center wheel, and the sub-wheel 03 ...
Embodiment 2
[0064] refer to Figure 5 , which shows a flow chart of steps of a control method provided by an embodiment of the present invention, which may specifically include:
[0065] Step 501: Judging whether each sub-wheel satisfies a preset braking condition.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com