A six-degree-of-freedom fixed-time rendezvous and docking control method for spacecraft
A technology of rendezvous and docking, fixed time, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of parameter estimated value and actual value deviation, parameter overestimation, strong conservatism, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The concrete implementation of the present invention is described in detail below, it is necessary to point out here that the following implementation is only used for further description of the present invention, and can not be interpreted as limiting the protection scope of the present invention. Some non-essential improvements and adjustments still belong to the protection scope of the present invention.
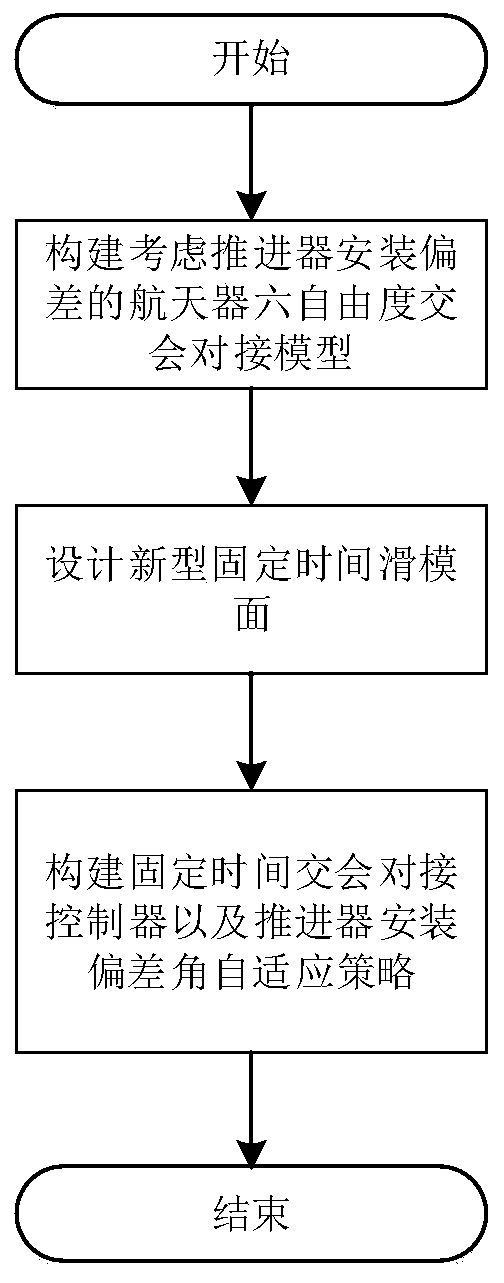
[0059] The invention provides a six-degree-of-freedom fixed-time rendezvous and docking control method for a spacecraft, which considers the propeller installation deviation, such as figure 1 As shown, the specific steps are:
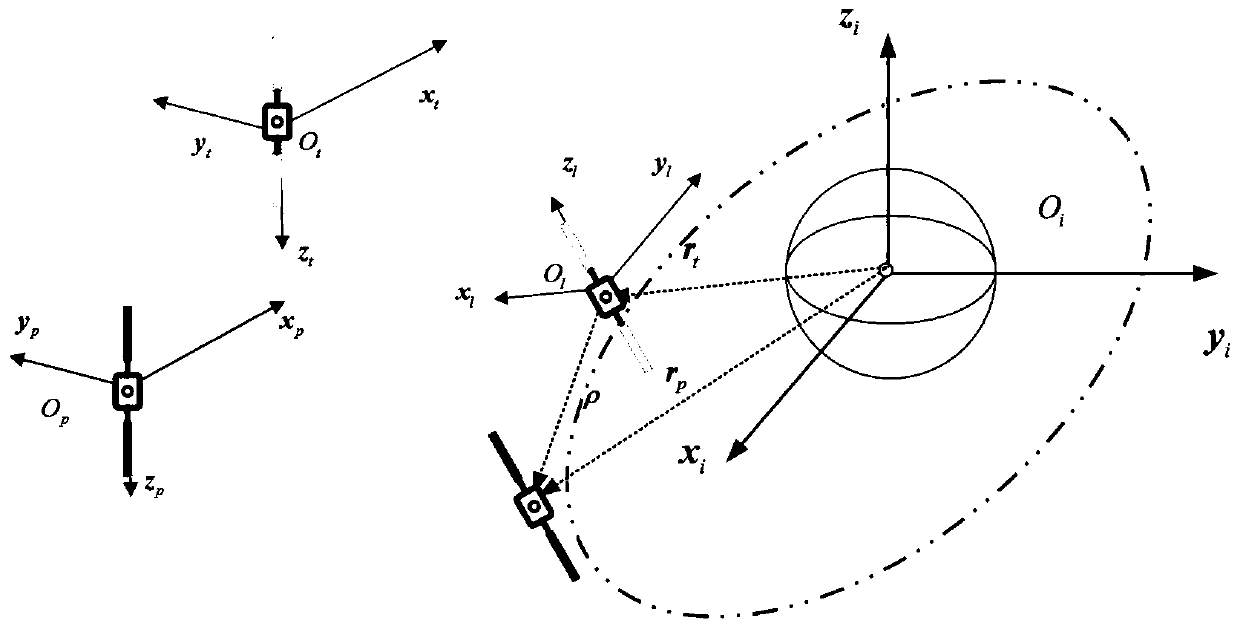
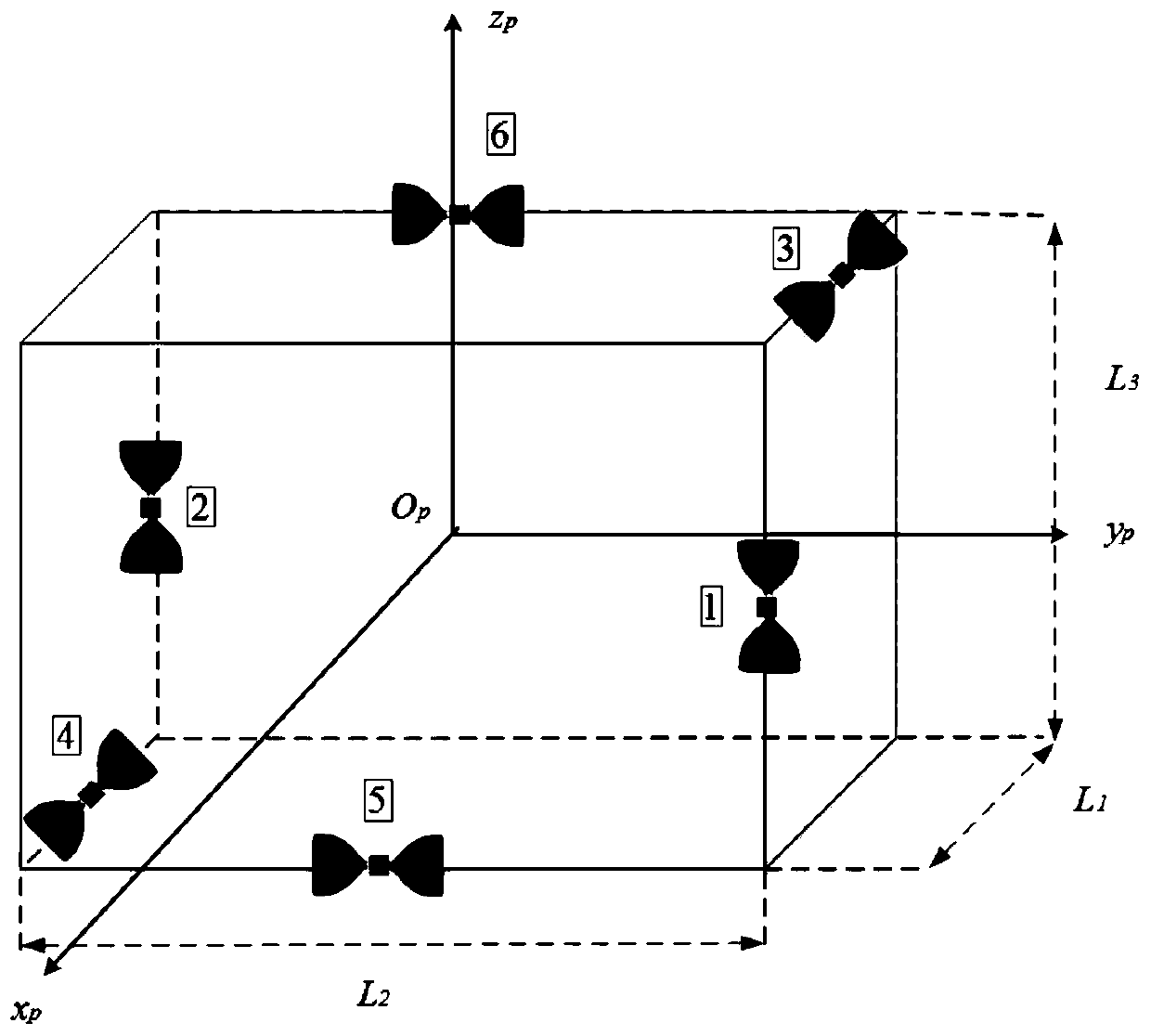
[0060] First, based on the relative motion law of the service spacecraft considering the thruster installation deviation to a freely rolling target spacecraft, the corresponding six-degree-of-freedom rendezvous and docking model is constructed; then, a new type of fixed-time sliding mode surface is designed by using the relevant motion varia...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com