Terminal vision guiding method for underwater mating of AUV and docking station
A visual guidance and underwater docking technology, applied in surveying and navigation, navigation, road network navigator, etc., can solve the problem that the depth gauge cannot meet the docking requirements, and achieve simplified image processing algorithms, reduced use costs, and improved reliability. sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0027] In order to describe the present invention more specifically, the technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
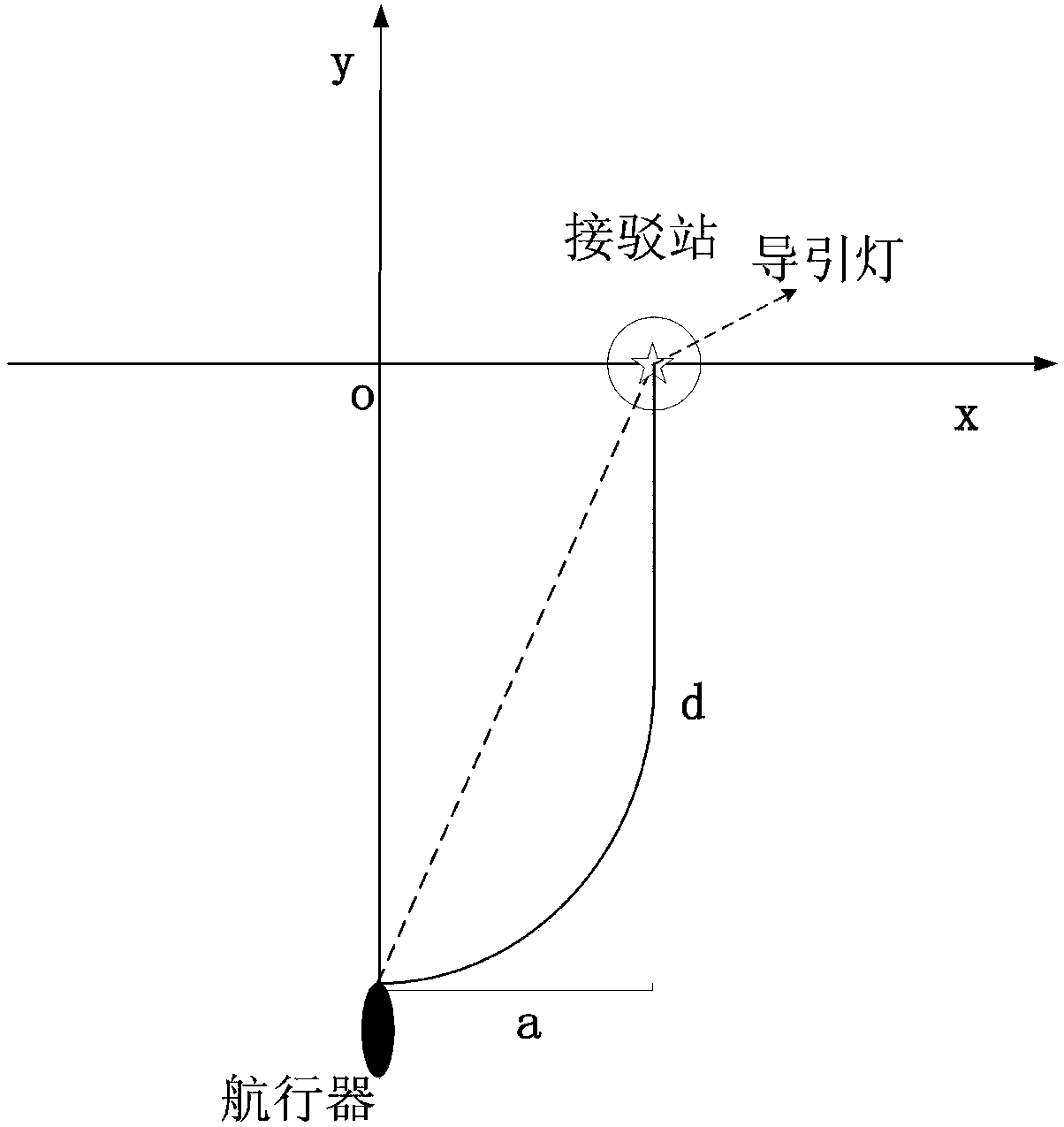
[0028] In the actual operation process of the present invention, the camera is installed on the bow of the aircraft, and the guide lights are installed on the docking station. The images captured by the camera are processed to obtain figure 2 The result shown in (b), figure 2 (a) is the image before processing; in this way, the position of the white pixel in the processed image represents the position of the underwater light of the docking station in the field of view of the aircraft camera, such as image 3 As shown in point A in the middle, the visual guidance is to use the horizontal deviation y and the vertical deviation z for docking guidance. image 3 Medium alpha v Indicates the declination angle of the visual output in the horizontal directio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com