Mechanical arm flexible joint control method based on fuzzy neural network
A fuzzy neural network and control method technology, applied in the field of robot dynamics control, can solve problems such as difficulty in obtaining control effects, complex and changeable working conditions of the manipulator, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0038] The embodiment of the present invention proposes a design and implementation method of a fuzzy neural network controller based on the Takagi-Sugeno model. Aiming at the time-varying characteristics of joint stiffness and joint friction nonlinearity, it ensures good control effects under different working conditions.
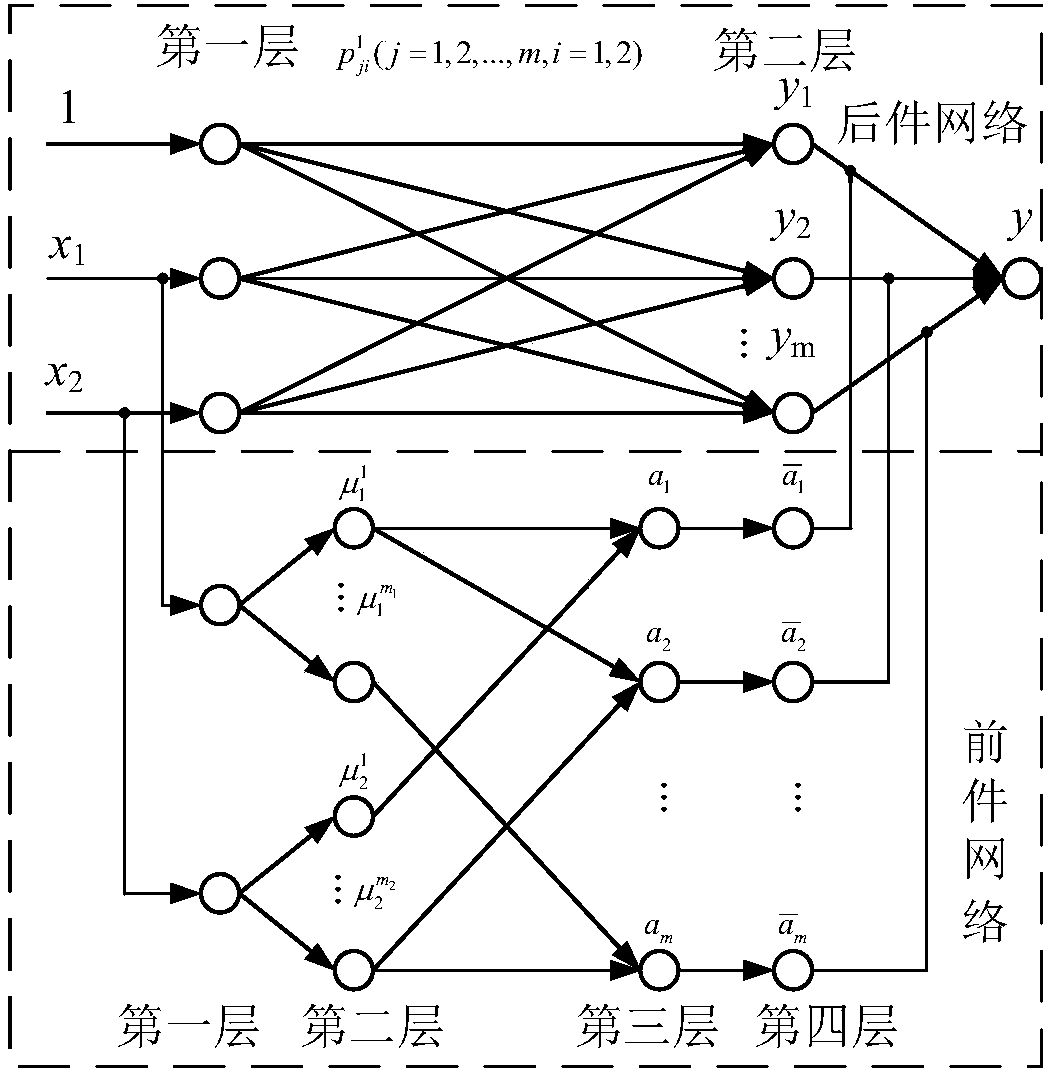
[0039] Such as figure 1 Shown, the establishment of the fuzzy neural network controller based on the Takagi-Sugeno model of the embodiment of the present invention comprises 4 steps, and step 1 is to set up the fuzzy neural network structure based on the Takagi-Sugeno model, and concrete steps include:
[0040] Step 1-1: Set the first layer of the antecedent network as the input layer, determine the parameters of the input layer, and transmit the input value vector to the second layer of the antecedent network, wherein each node of the input layer is directly connected to the input vector The components of x i connect;
[0041] Each of its nodes is dire...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com