Cable-driven flexible robot capable of stretching and bending simultaneously
A line-driven, robotic technology, applied in the field of robotics, can solve the problems of lack of stability and bearing capacity, inability to adapt, and the radius of concentric tubes cannot be infinitely reduced, so as to achieve the effect of good approximation to the planned path
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0017] The present invention will be further described in detail below in conjunction with accompanying drawings and examples.
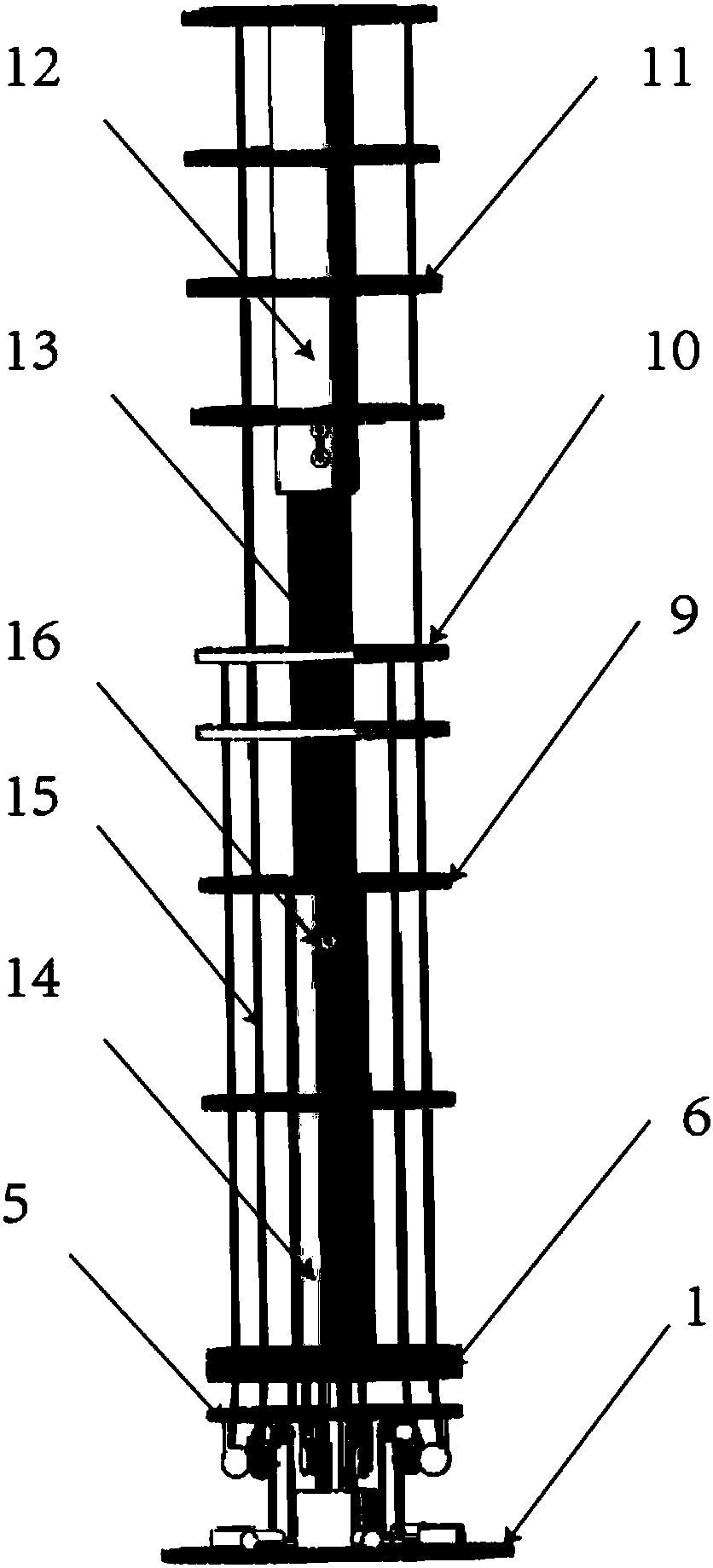
[0018] The invention is a flexible robot that can be stretched and bent at the same time driven by wires, such as figure 1 As shown, it includes drive module base 1, motor 2, pulley 3, pulley 4, drive connection plate 5, drive top connection plate 6, connection rod 7, middle drive module 8, disc 9, disc 10, disc 11 , flexible pipe 12, central flexible pipe 13, flexible pipe 14, rope 15, air eye nail 16.
[0019] This wire-driven flexible robot system that can simultaneously stretch and bend is composed of a manipulation module and a driving module. The manipulation module is composed of three flexible sleeves 12, 13, 14 capable of bending and stretching. Any two joints of the inner and outer sleeves can slide relative to each other and the sequence is controllable. Each bending and telescopic module includes a flexible sleeve 12-14, a disk 9-11 wit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com