A retractable three-degree-of-freedom industrial robot arm
A technology of industrial machinery and degrees of freedom, applied in the directions of manipulators, program-controlled manipulators, claw arms, etc., can solve the problem of less manipulators, and achieve the effect of stable movement, simple and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
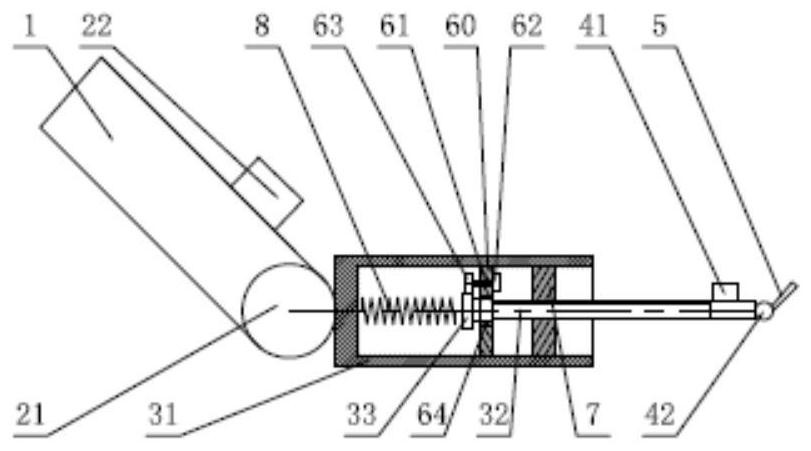
[0018] see figure 1 As shown, a scalable three-degree-of-freedom industrial mechanical arm of the present invention includes a mechanical forearm that can freely expand and contract, and uses a hinge to connect the mechanical humerus 1 to the elbow joint 21 of the mechanical forearm. The right end of the arm and the wrist joint 42 of the manipulator 5 are installed on the mechanical humerus 1. The power mechanism A22 that can drive the mechanical forearm to rotate around the elbow joint 21 is installed on the mechanical forearm to drive the manipulator 5 around the wrist joint 42. Relatively rotating power mechanism B41 is characterized in that:
[0019] see figure 1 As shown, the mechanical forearm includes a mechanical forearm body 31, a mechanical forearm telescopic rod 32, and a forearm torsion joint; the mechanical forearm body...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com