End effector structure of garden stuff picking robot
A technology for picking robots and end effectors, which is applied to picking machines, manipulators, harvesters, etc., and can solve problems such as reducing the stability of fruit and vegetable pinching, difficult control, and deformation when pulling ropes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
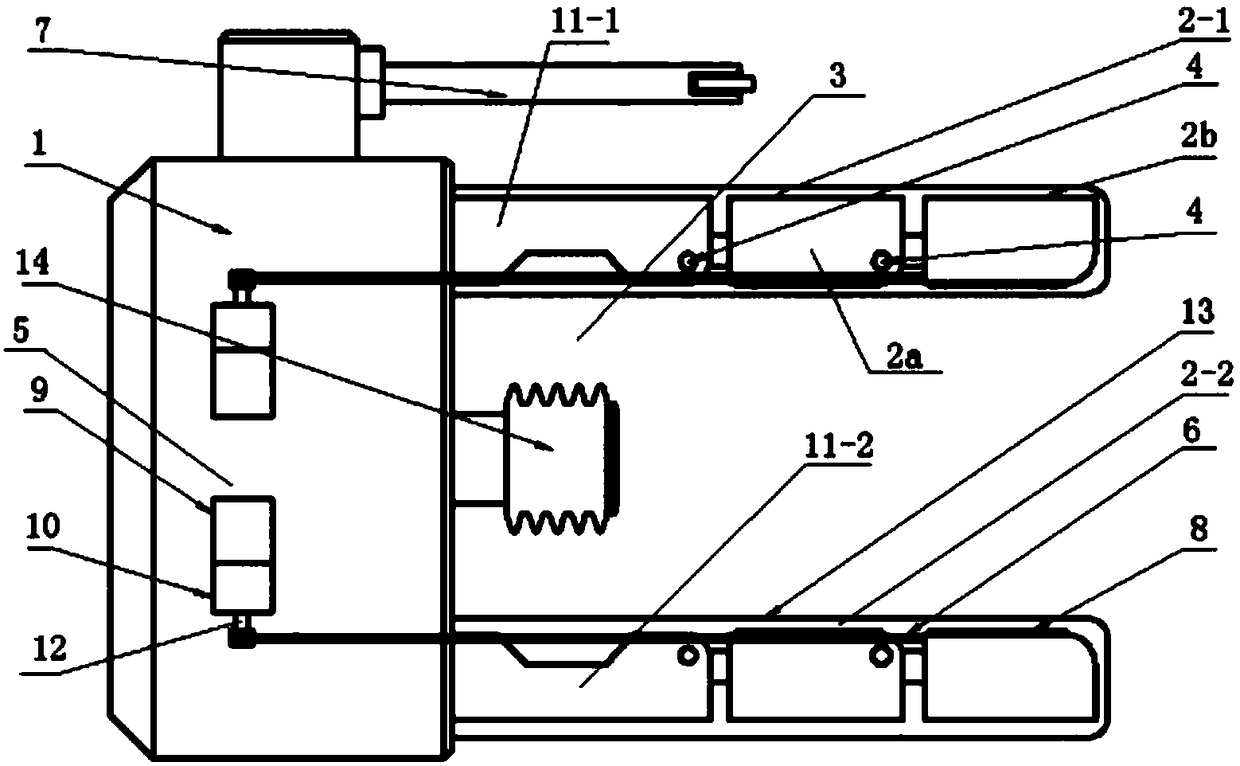
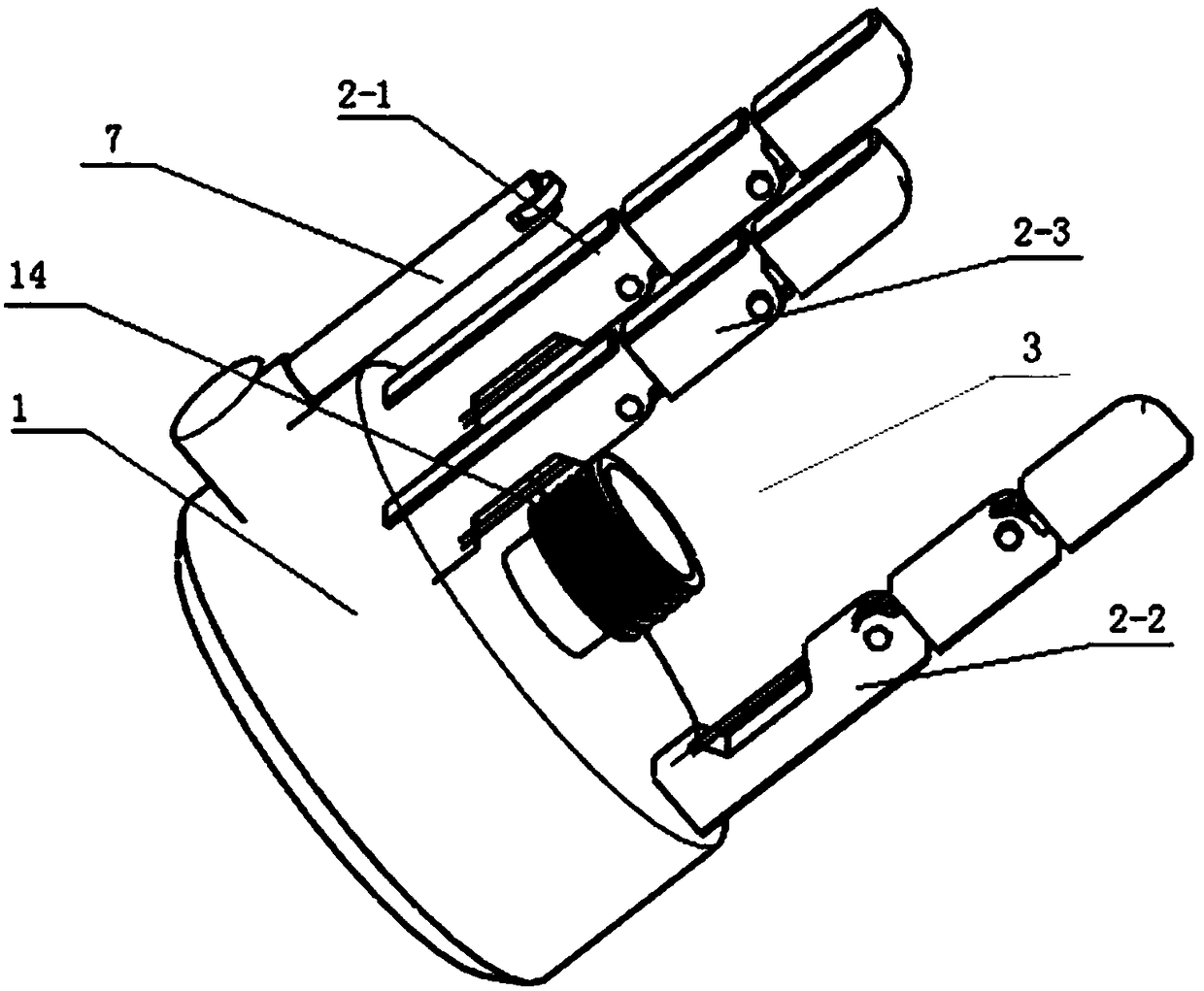
[0017] See figure 1 , figure 2 , an end effector structure of a fruit and vegetable picking robot, which includes a driving box 1, and the driving box 1 is provided with three movable knuckles 2-1, 2-2, 2-3, and the movable knuckles 2-1, 2-2, 2-3 is arranged circumferentially to form a storage cavity 3, and the movable knuckles 2-1, 2-2, and 2-3 are respectively connected to the drive box 1 through torsion springs or tension springs 4, and the drive box 1 is provided with a movable knuckle 2- 1, 2-2, 2-3 corresponding to the driving device 5, the driving device 5 is connected to the movable knuckles 2-1, 2-2, 2-3 respectively through the key rope 6, and the telescopic cutting is arranged outside the storage cavity on the driving box 1 Device 7, movable phalanx 2-1, 2-2, 2-3 inner side is provided with pressure sensor 8, tightens up the key rope by driving device 5, overcomes the contraction of key rope preferably, has guaranteed the pinching of movable phalanx The holding r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com