A Modified Inertial Navigation Method for Communication Antenna in Motion and Its Composed Hybrid Navigation Method
A technology of communication-in-motion and integrated navigation, which is used in navigation, measurement devices, instruments, etc. through velocity/acceleration measurement. It can solve problems such as long initial alignment algorithm time, difficulty in capturing satellites with a communication-in-motion antenna, and inability to receive GPS.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0064] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
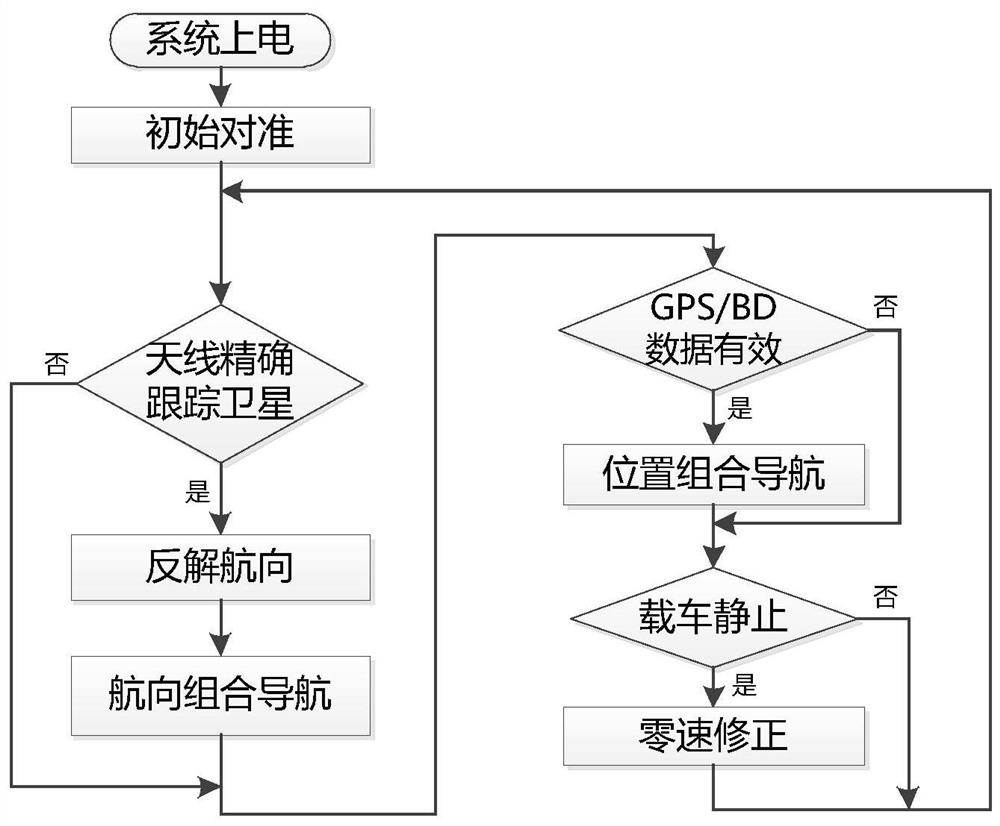
[0065] as attached figure 1 As shown, the inertial navigation error correction method of the present invention comprises the following steps:
[0066] (A) After the system is powered on, align the pitch and roll angles in the first 3 seconds. The initial alignment formulas for pitch and roll angles are as follows:
[0067]
[0068] In the formula, and Indicates the initial alignment result of the pitch and roll angles of the kth cycle, and Indicates the initial alignment result of the pitch and roll angles of the k-1th cycle, θ k and gamma k Indicates the pitch angle and roll angle calculated by using the inertial navigation accelerometer measurement value in the kth cycle, α k As a weighting factor, it can avoid the shortage of align...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com