Muti-constraint-based high-precision binocular camera calibration method
A technology of binocular camera and calibration method, applied in image data processing, instrumentation, computing, etc., can solve problems such as only considering adjacent distance constraints, lacking geometric constraints of 3D reconstruction points, ignoring geometric constraints, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] The present invention will be further described below in conjunction with drawings and embodiments.
[0068] Embodiments of the present invention and its implementation process are as follows:
[0069] The experiment uses a binocular vision calibration platform consisting of two CMOS industrial cameras with a pixel size of 2448*2048 and a chessboard calibration board.
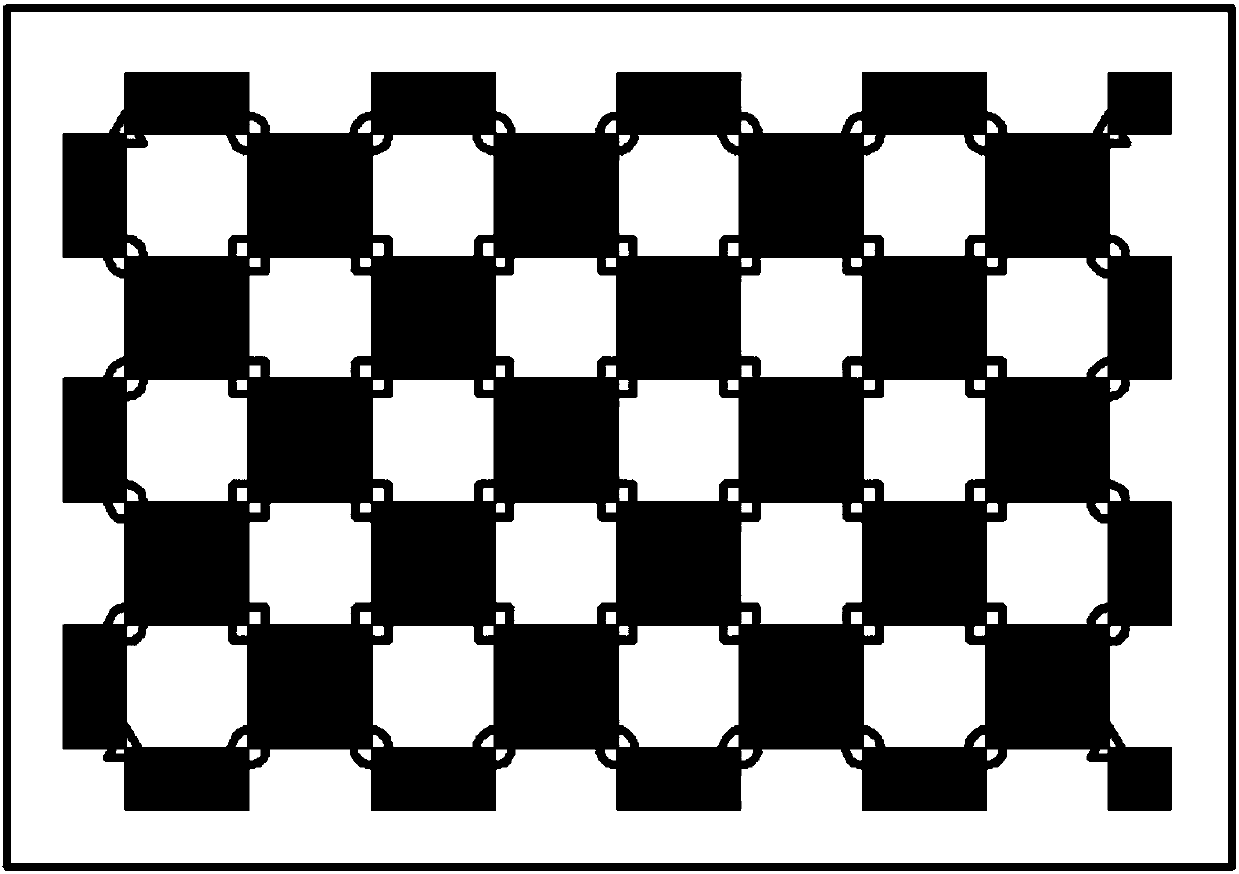
[0070] (1) Place and fix the same black and white chessboard containing 54 feature points, and use a binocular camera to take a pair of images from 13 viewing angles, and obtain a total of 26 images. The angle between the shooting direction and the plane where the checkerboard is located is greater than 30 degrees, the distance between the binocular camera and the checkerboard is between 1 and 3m, and the checkerboard is completely displayed in the images of the left and right cameras.
[0071] Use Zhang Zhengyou's calibration method to calculate the internal parameter matrix A of the left camera l , l...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Angle | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com