Independent suspension mechanism for omni-directional mobile platform
A technology of independent suspension and omnidirectional movement, applied in the direction of suspension, elastic suspension, transportation and packaging, etc., can solve problems such as unstable center of gravity, large shaking, stable platform operation, poor obstacle-crossing ability, etc., to reduce the impact High degree, strong obstacle-crossing ability, and good load-bearing rigidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0023] The present invention will be described in detail below in conjunction with the accompanying drawings.
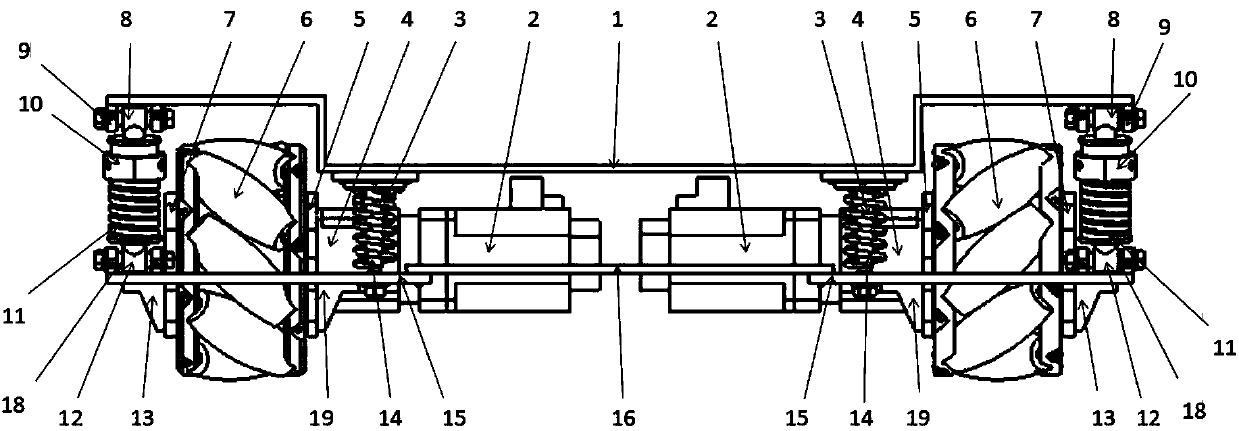
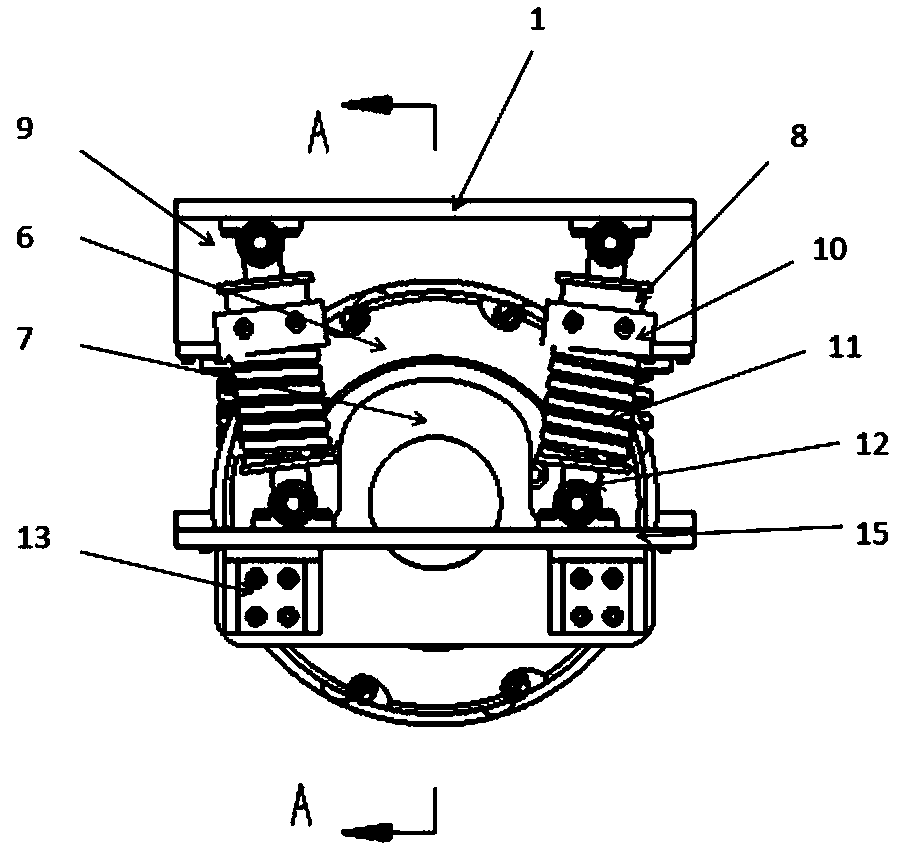
[0024] refer to figure 1 , figure 2 , image 3 and Figure 4 , an independent suspension mechanism for an omnidirectional mobile platform, including two mecanum wheels 6 symmetrically arranged left and right, each mecanum wheel 6 is connected to a driving device inside, and the driving device includes a motor 2, an output shaft of the motor 2 and The input shaft of the reducer 4 is connected, the output shaft of the reducer 4 passes through the reducer connecting flange 5 and the deep groove ball bearing 17, and is fixedly connected with the mecanum wheel 6 through a key, and the reducer connecting flange 5 passes through the deep groove ball bearing 17 is connected to the inner side of the hub of the mecanum wheel 6, the driving device drives the movement of the corresponding mecanum wheel 6, and the reducer 4 realizes the speed control; the shell of the motor 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com