Multi-axle steering vehicle large curvature automatic driving and steering control method
A technology of steering control and automatic driving, which is applied in the direction of steering control installed on the vehicle, non-mechanical steering control components, vehicle position/route/height control, etc. It can solve the problem of unsatisfactory tracking performance and achieve superiority sexually apparent effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described below in conjunction with the accompanying drawings and specific preferred embodiments, but the protection scope of the present invention is not limited thereby.
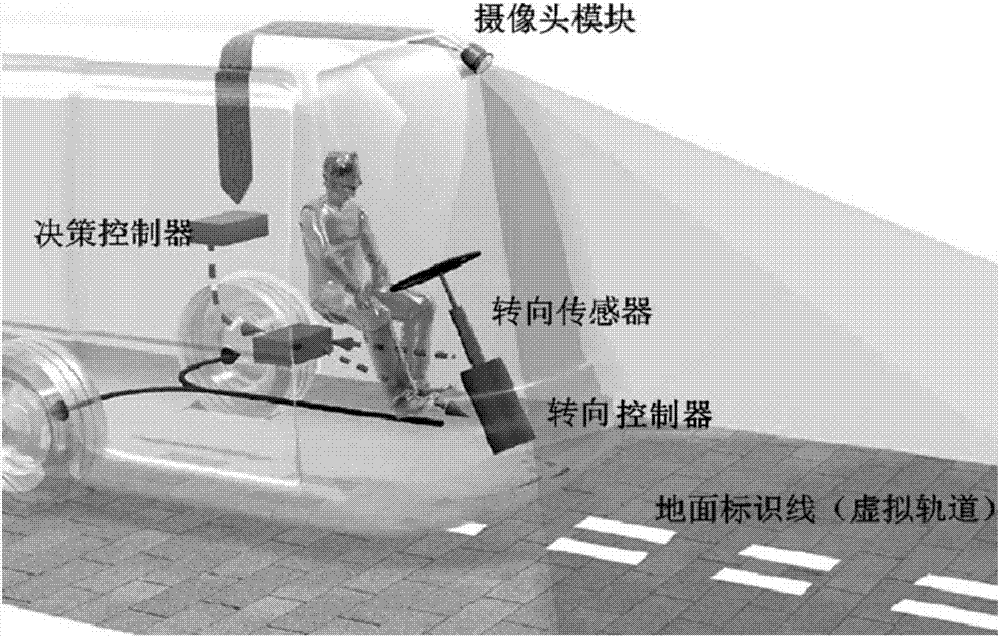
[0041] Such as figure 1 As shown, the rubber-tired train applied in this embodiment has an intelligent driving assistance system based on monocular vision. By extracting the reference path information of the ground marking line, the corresponding steering parameters are automatically obtained, and the vehicle automatically tracks the central virtual trajectory line for automatic driving. .
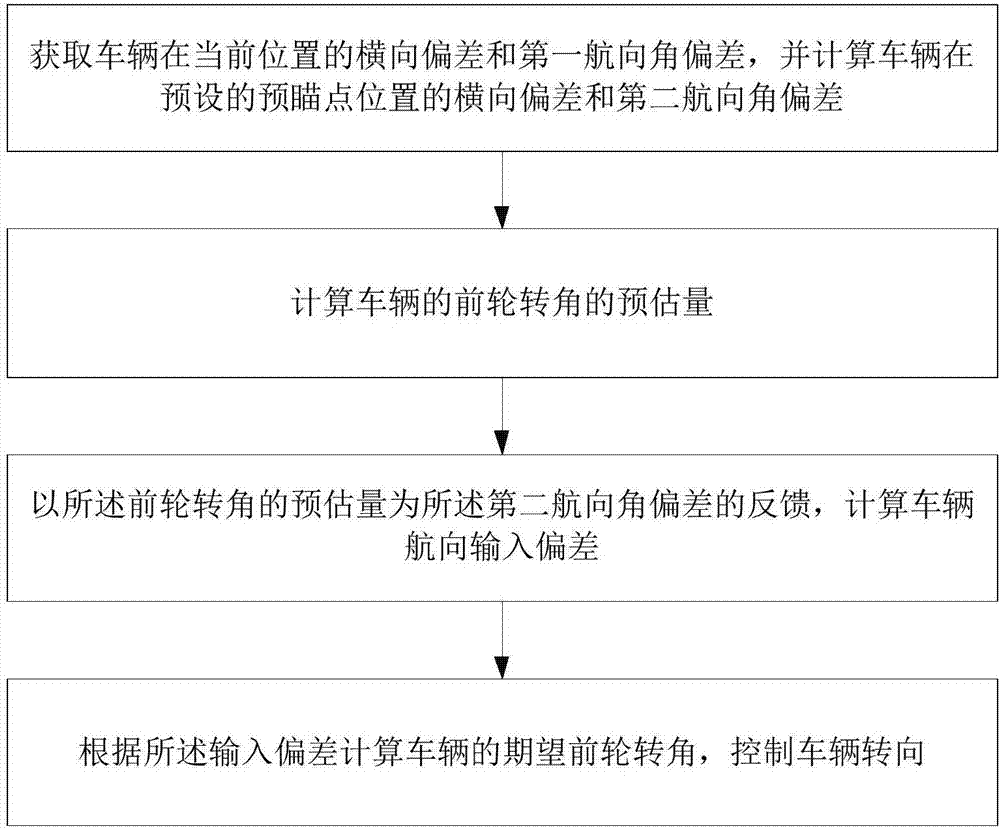
[0042] Such as figure 2 As shown, the steering control method for large-curvature automatic driving of a multi-axis steering vehicle in this embodiment includes the following steps: S1. Obtain the lateral deviation Y of the vehicle at the current position e (t) and the first heading angle deviation And calculate the lateral deviation Y(t) and the second heading angle de...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com