Collision avoidance method of fixed wing unmanned plane multi-target collision avoidance system based on millimeter wave radar
A technology of millimeter wave radar and anti-collision system, which is applied in the field of signal processing and can solve problems such as affecting obstacle avoidance functions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
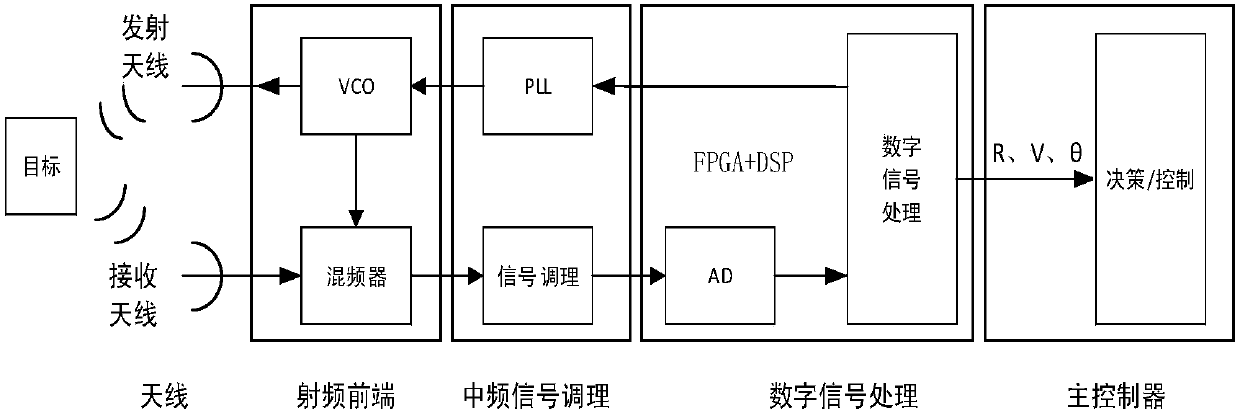
[0024] Embodiment 1: A multi-target collision avoidance system for fixed-wing UAVs based on millimeter-wave radar, including antenna subsystems, radio frequency subsystems, signal conditioning subsystems, and signal processing subsystems;
[0025] The antenna subsystem forms the transmitting and receiving beams required for radar detection, radiates the transmitting signal to the designated area, and receives the scattered echo signal of the target in the designated area;
[0026] The radio frequency subsystem generates a transmission signal and the frequency of the transmission signal changes according to the law of the modulation signal, so as to realize the output of linear frequency modulation continuous wave;
[0027] The signal conditioning subsystem is used to filter and amplify the amplitude of the intermediate frequency analog signal;
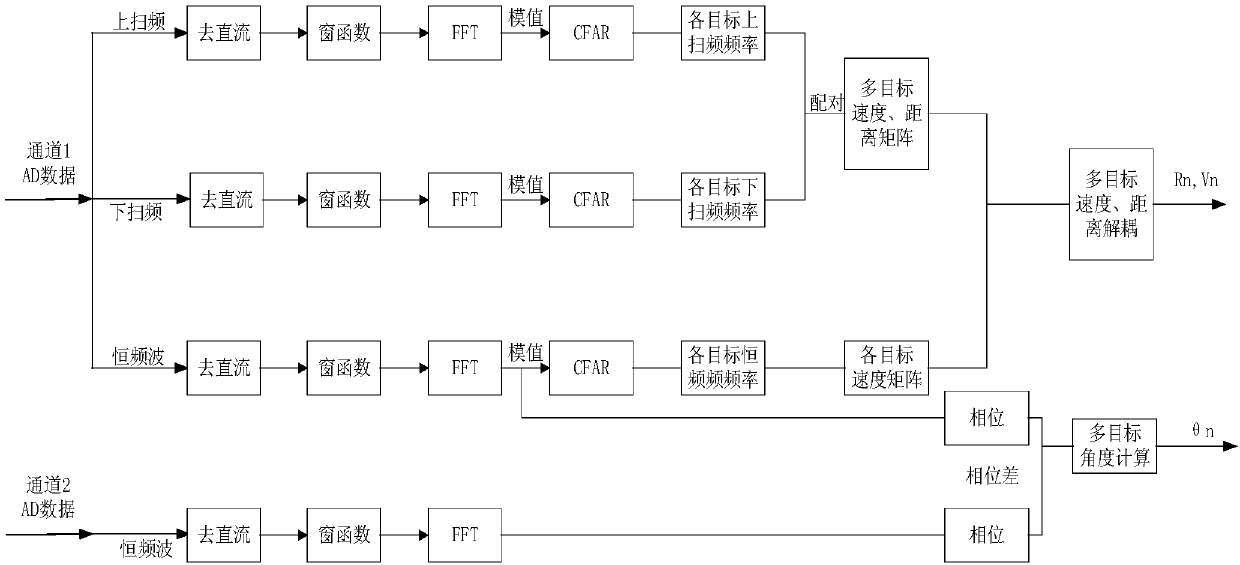
[0028] The signal processing subsystem enables the four-way I / Q intermediate frequency signals output by the signal conditioning subs...
Embodiment 2
[0056] Embodiment 2: the anti-collision method of the multi-target anti-collision system of the fixed-wing unmanned aerial vehicle based on the millimeter-wave radar described in a kind of embodiment 1, comprises the steps:
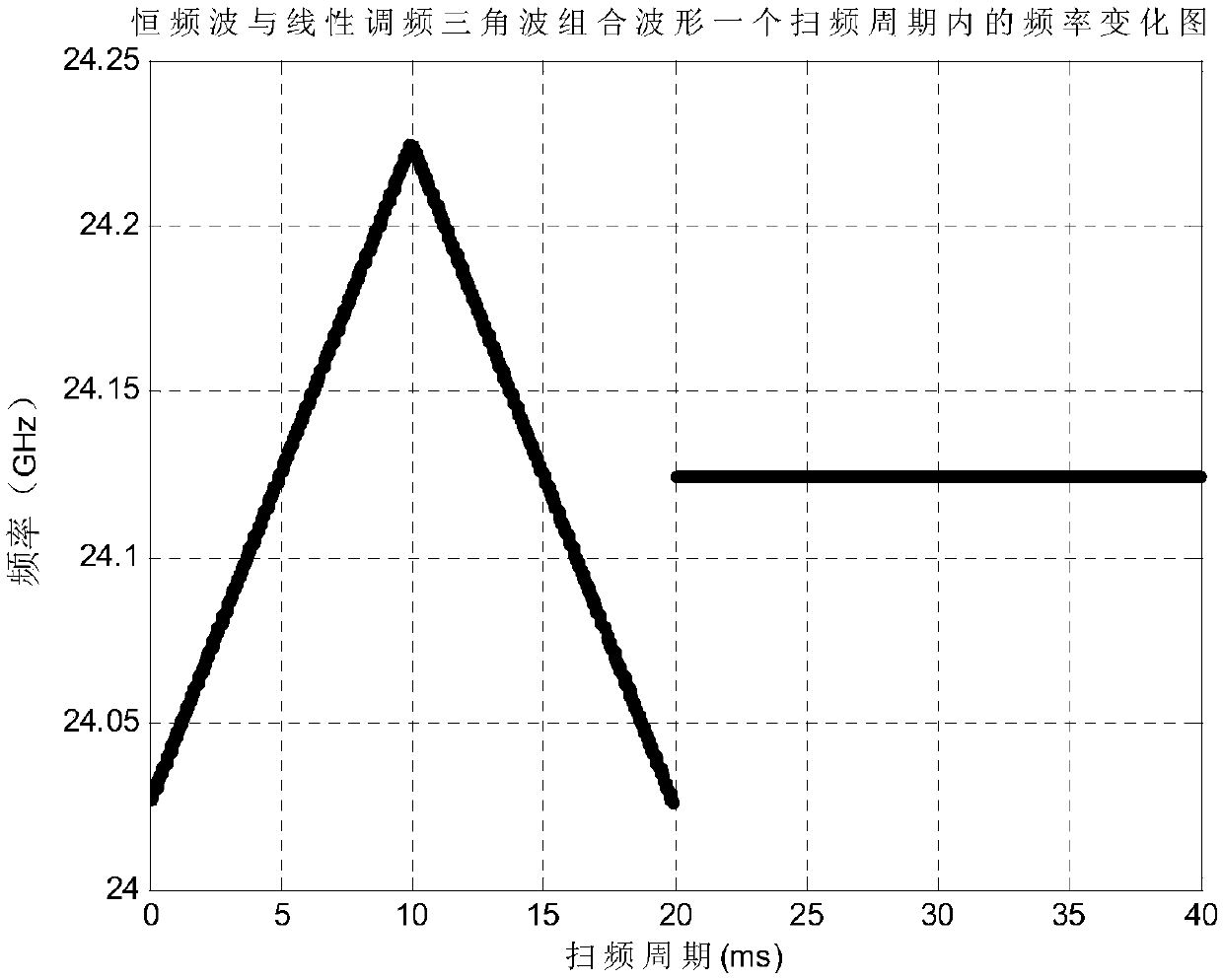
[0057] S1. The FPGA chip of the signal processing subsystem controls the PLL phase-locked loop to transmit a modulated signal with a certain amplitude and frequency. This embodiment is a group and waveform of linear frequency modulation continuous triangle wave and constant frequency wave. The phase-locked loop can be used The transmitted waveform data is more accurate, thereby improving the performance of the system;
[0058] S2. The voltage-controlled oscillator VCO of the radio frequency subsystem generates a transmission signal within a certain range under the action of the PLL phase-locked loop, and the frequency of the transmission signal changes according to the law of the modulation signal, thereby realizing the working mode of linear frequency mod...
Embodiment 3
[0065] Embodiment 3: As a supplement to Embodiment 1 or 2, the farthest detection distance of the multi-target collision avoidance system for fixed-wing unmanned aerial vehicles based on millimeter-wave radar designed in this embodiment can reach 150m or more. Sensors, infrared sensors, ultrasonic radar sensors and other obstacle avoidance sensors can not reach the distance, and the millimeter wave radar can realize the accurate acquisition of target-related information in the environment in front of the fixed-wing flight, such as the relative distance between the target and the UAV, relative speed and Relative angle, etc., and this system can realize the detection of multi-moving and static target obstacles in complex environments, so that fixed-wing UAVs can quickly perform obstacle avoidance even in complex multi-moving and static target obstacle environments . Therefore, this embodiment focuses on an implementation method of a high-performance fixed-wing UAV obstacle avoid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com