Collision-prevention control method for vehicle
A control method and vehicle technology, applied in the direction of control devices, vehicle components, external condition input parameters, etc., can solve the problem of insufficient consideration of the limitations of ride comfort and road adhesion ability, the failure to exert the potential of braking and steering collision avoidance, and the actual driving Large differences in working conditions and other problems, to achieve the effect of improving the level of road traffic safety, improving the ability to avoid collisions, and having a wide range of applications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The present invention is described in further detail below in conjunction with accompanying drawing:
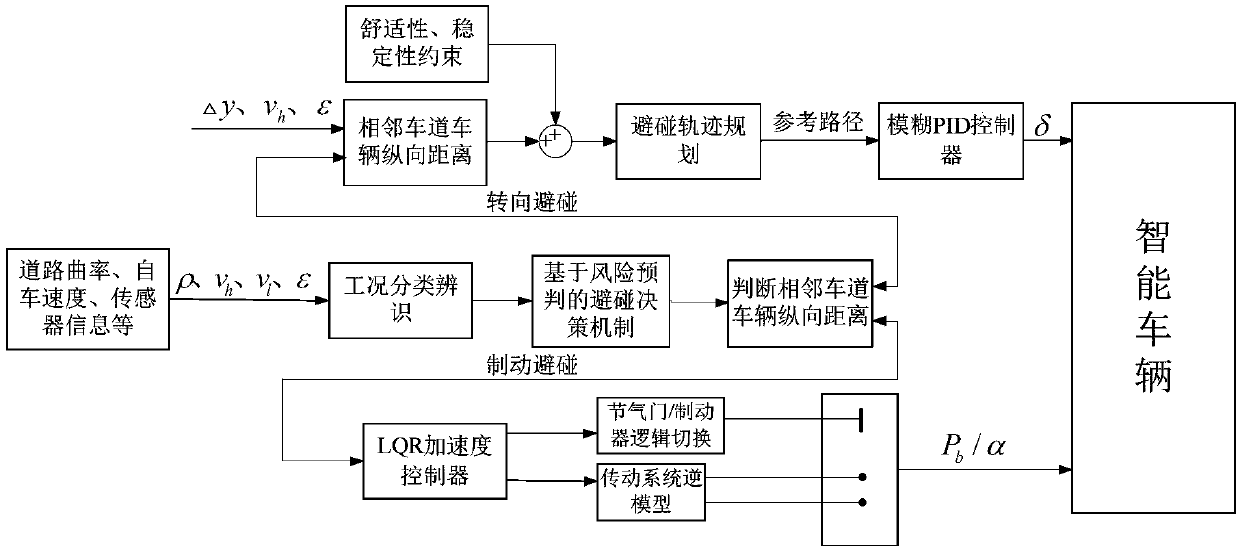
[0063] A vehicle collision avoidance control system, comprising a steering / braking collision avoidance decision-making unit, a steering collision avoidance reference path planning unit, a lateral fuzzy PID controller, a longitudinal LQR desired acceleration controller and a vehicle inverse longitudinal dynamics model;
[0064] Such as Figure 1 to Figure 11 As shown, a vehicle collision avoidance control method includes the following steps:
[0065] Step 1. Obtain the information of the vehicle's own moving speed, vehicle's own acceleration, vehicle's own valve opening and vehicle's own braking pressure, obtain the speed and acceleration of the front vehicle, and obtain the longitudinal distance D between the vehicle itself and the front vehicle adj ;
[0066] Step 2, according to the motion state information of the vehicle itself and the vehicle in front, establish ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com