Ostrich-like robot walking mechanism
A walking mechanism and robot technology, applied in the field of bionic robots, can solve the problems that it is difficult to achieve the movement speed and load capacity of an ostrich, cannot fully imitate the movement gait of an ostrich, and the driving force and movement speed are small, etc. Difficulty of maintenance, effect of increasing elasticity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
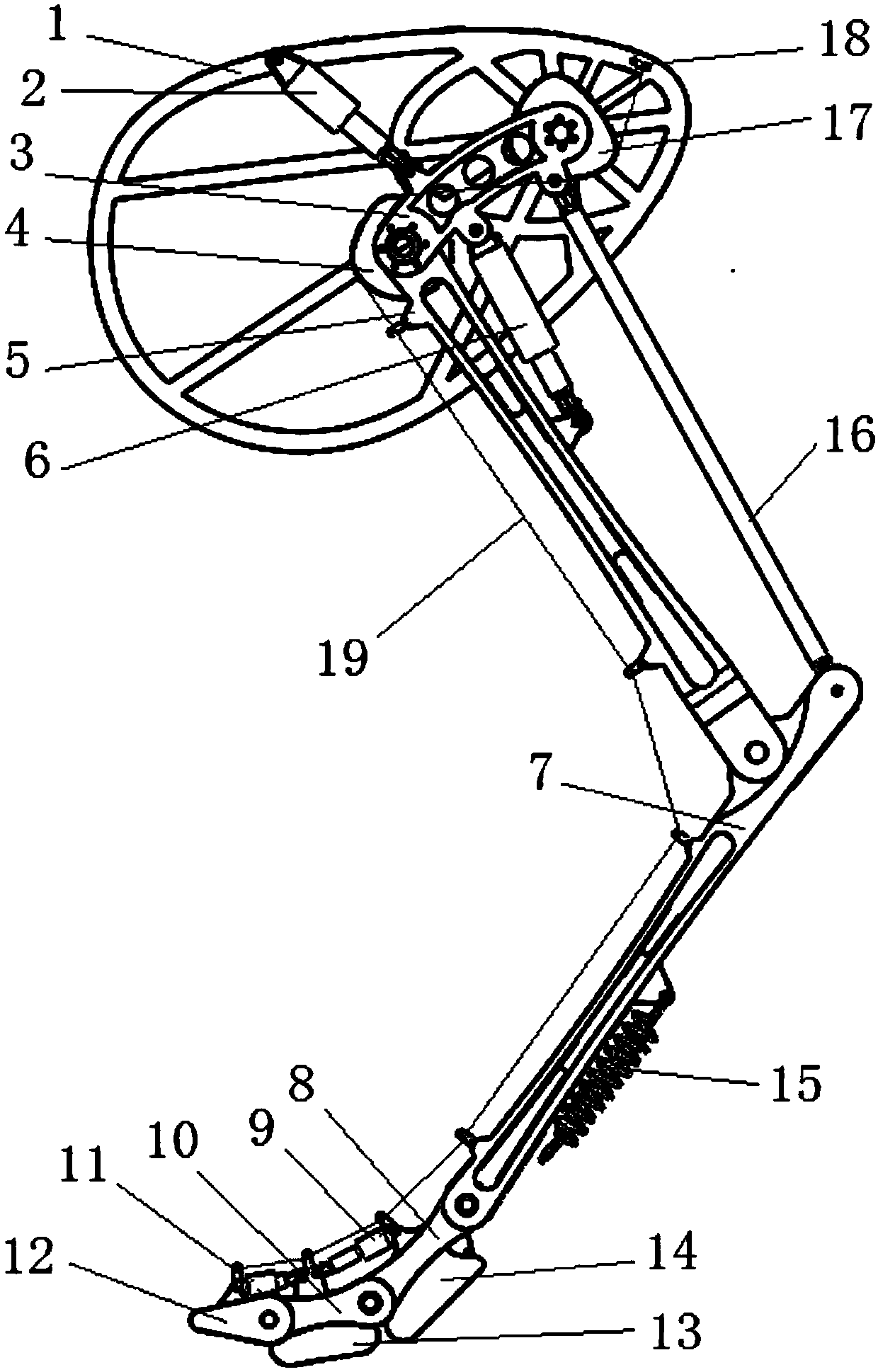
[0024] The imitation ostrich biped robot walking mechanism of the present invention, as figure 1 As shown, it includes trunk 1, femur 3, tibia 5, metatarsal 7, middle link 16 and three toes.
[0025] A femur swing hydraulic cylinder 2 is installed on the trunk 1 . The first cam 4 is fixedly installed on the trunk 1, the femur 3 is hinged on the trunk 1, and is hinged with the piston rod of the femoral swing hydraulic cylinder 2, and the hinge shaft of the femur 3 and the trunk 1 can be installed coaxially with the first cam 4. The femur swing hydraulic cylinder 2 can drive the femur 3 to swing around the trunk 1, and the swing angle is 100°.
[0026] The femur 3, the tibia 5, the attached metatarsal 7 and the middle link 16 form a four-bar mechanism. One end of the tibia 5 and the middle link 16 is hinged with the femur 3, and the other end is hinged with the attached metatarsal 7. A tibial swing hydraulic cylinder 6 is installed on the femur 3 , and the piston rod of the ti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com