Stereoscopic vision measurement manual mark point based on speckle image matching
A technology of stereo vision measurement and speckle image, applied in the field of vision measurement, to avoid deviation, meet glare interference suppression, and meet the needs of precise positioning of artificial markers
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0029] The artificial marking point pattern form that the present invention provides is in existing white circular artificial marking point (seeing figure 2 ) on the basis of adding a speckle pattern block to form a three-layer ring structure. Figure 4 A design example using rings and disks as ring pattern shapes is given, where 11 is the black ring on the outer layer, 12 is the white ring on the middle layer, and 10 is the speckle pattern block on the inner layer. The difference from the existing white circular artificial marking points is: 1) The black ring (11) on the outer layer is wider, which is more beneficial to cut off white glare. The specific width can be adjusted according to the application. When measuring a distance of one meter, it is recommended The width is more than 10mm; 2) The white ring (12) in the middle layer is relatively narrow, and the specific width can be adjusted according to the application. When measuring a distance of one meter, the recommende...
Embodiment 2
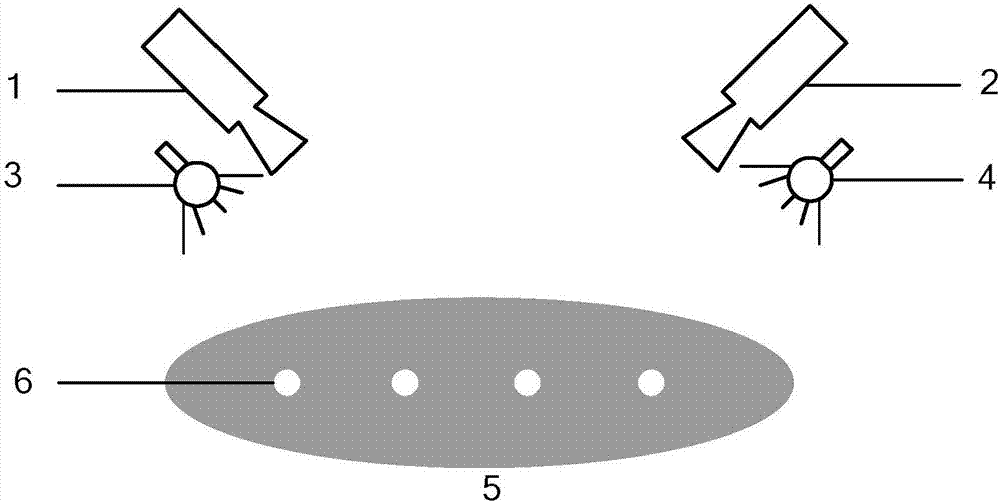
[0031] The three-dimensional measurement principle of the artificial marker point proposed by the present invention is: under the known situation of the image coordinates of the artificial marker point center (this center is defined as the circle center of the outer edge of the white circle) taken by the first camera, define a circle with a radius of ω disc, the disc is located in the speckle pattern block 10, as a reference speckle image, in the artificial marker image captured by the second camera, the corresponding matching point is found by digital speckle correlation method (DSCM), that is, Realize the extraction of the center image coordinates of the artificial marker points in the images captured by the two cameras, and then use the stereo vision calibration results to obtain the three-dimensional coordinates of the artificial marker points through 3D reconstruction.
[0032] In the actual measurement process, the captured artificial markers are not necessarily the ortho...
Embodiment 3
[0038] Embodiment 2 provides a basic method for locating artificial markers according to the present invention, and Embodiment 3 provides a method for quickly locating artificial markers. The difference from embodiment 2 is that in step 3, manual marker recognition is performed first, and then manual marker positioning is performed. The specific implementation method is to first detect the white rings in the white area, and then use the speckle pattern block judgment criterion to eliminate the white rings that do not contain speckle pattern blocks inside, and perform speckle image block matching in the remaining white rings. In this way, the search and matching range of the speckle image blocks can be reduced, the amount of image data processing can be reduced, and the matching speed can be improved. The judgment criterion of the speckle pattern block adopted is: ψ>ε, where ψ is the average gradient intensity of the pixels in the white circle, and ε is the judgment threshold, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com