Real-time image stitching method based on circular tube operation robot
An operation robot and real-time image technology, applied in image enhancement, image analysis, image data processing, etc., can solve the problems of uncommonly used round pipe operation robots, etc., and achieve the effects of easy calculation and processing, high splicing efficiency, and full assurance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be described in detail below with reference to the drawings and specific embodiments. This embodiment is implemented on the premise of the technical solution of the present invention, and a detailed implementation mode and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
[0045] Such as figure 1 with figure 2 Shown here is a real-time image stitching method based on a circular tube working robot proposed in this application, including:
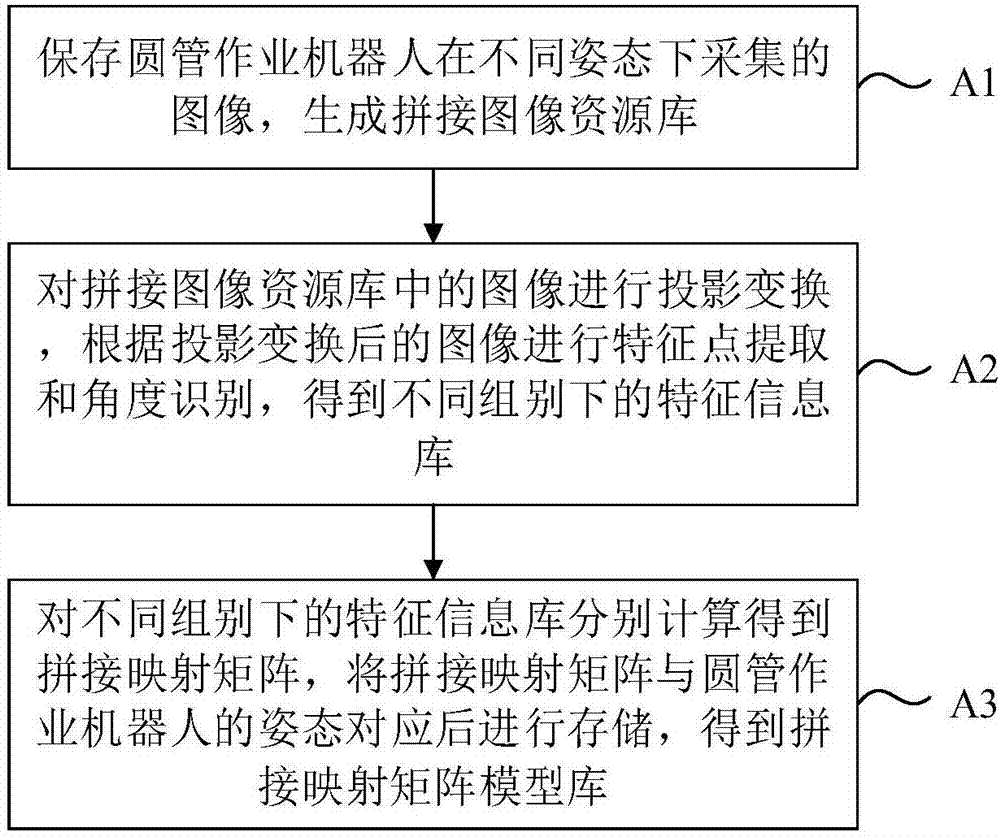
[0046] Steps for establishing the splicing mapping matrix model library: perform projection transformation on the images collected by the circular tube working robot in different poses, and calculate and record the splicing mapping matrix corresponding to each pose according to the projection transformation results to obtain the splicing mapping matrix model library;
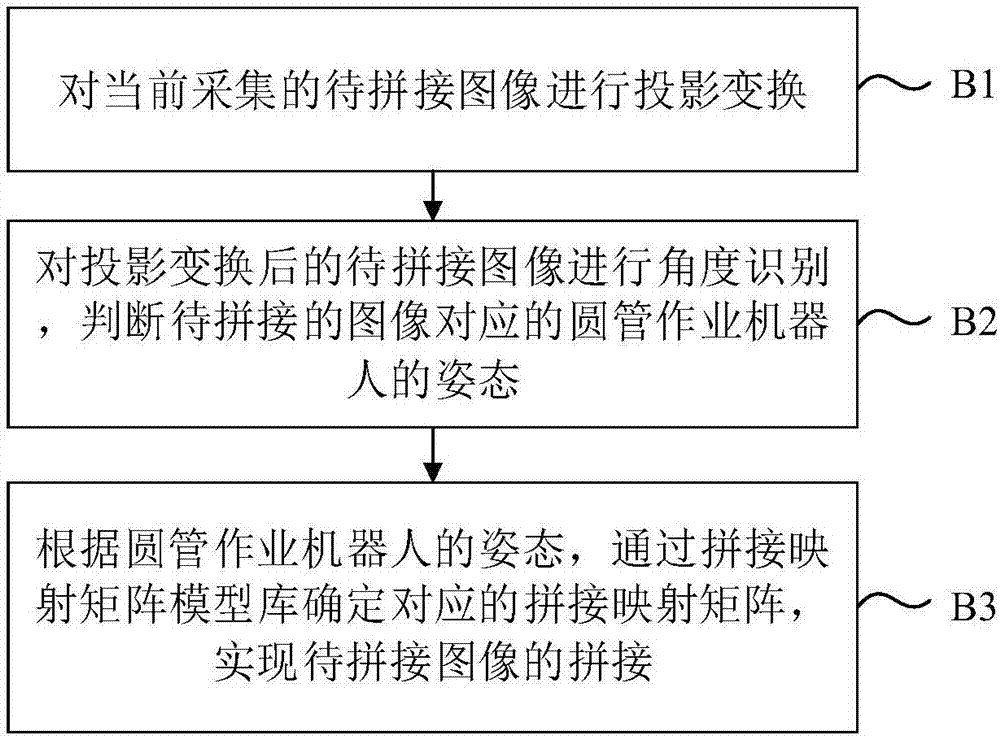
[0047] In the real-time image stitching step, the straight line ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com