Wide baseline matching method and device
A matching method and matching device technology, applied in image data processing, instrumentation, computing, etc., can solve problems such as wide baseline matching of structured scene images, and achieve scale invariance, strong stability, and rotation invariance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
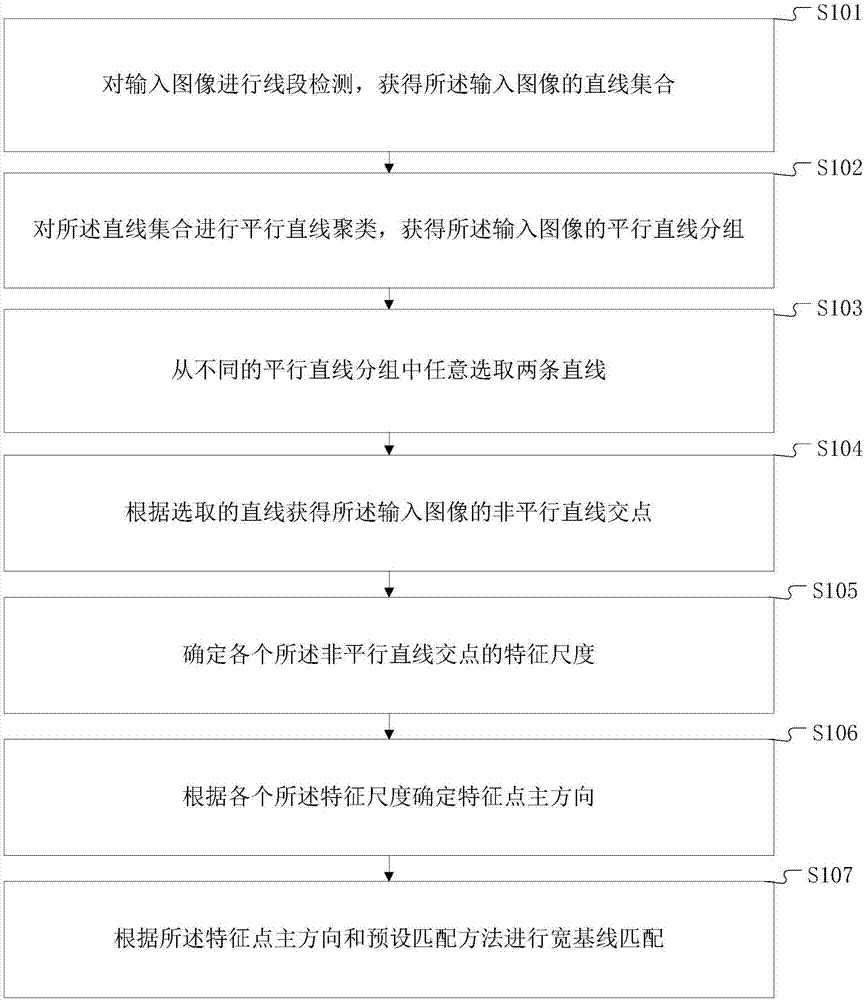
[0034] figure 1 The implementation flow of the wide baseline matching method provided by Embodiment 1 of the present invention is shown. As shown in the figure, the method may include the following steps:
[0035] Step S101, performing line segment detection on an input image to obtain a set of straight lines of the input image.
[0036] Here, the line segment detection method can be selected according to actual needs to perform line segment detection on the input image, for example, the LSD (Line Segment Detector, Line Segment Detector) line detection algorithm is used to perform line detection on the input image to obtain a single-pixel width line set of the input image.
[0037] Step S102, performing parallel straight line clustering on the set of straight lines to obtain parallel straight line groups of the input image.
[0038] Specifically, by using the property that parallel line segments intersect at the vanishing point, the above-mentioned set of straight lines is c...
Embodiment 2
[0075] In order to better understand the above method, an application example of the wide baseline matching method of the present invention will be described in detail below.
[0076] like Figure 7 As shown, this application example may include:
[0077] Step S701, using the LSD algorithm to detect the line segment of the input image, and obtain the set of single-pixel width straight lines represented by endpoints Ls={p 1 (x 1 i ,y 1 i ),p 2 (x 2 i ,y 2 i ), i=1,2,...,m}. LSD is a local line segment detection algorithm with fast operation speed and high precision.
[0078] Step S702, using the characteristic that parallel line segments intersect at the vanishing point, classify the line segment set Ls, and obtain the line segment grouping Ls={Ls j , j=1,2,...,N}, where Ls j Represents the jth subset Ls of the set of line segments j ={p j1 (x j1 i ,y j1 i ),p j2 (x j2 i ,y j2 i ), i=1,2,...,m}. Using the vanishing point detection and line segment class...
Embodiment 3
[0100] Corresponding to the wide baseline matching method described in the above embodiment, Figure 8 A structural block diagram of the wide-baseline matching device provided by the embodiment of the present invention is shown. For the convenience of description, only the parts related to this embodiment are shown.
[0101] refer to Figure 8 , the device includes a line segment detection module 801, a straight line clustering module 802, a straight line selection module 803, a straight line intersection obtaining module 804, a characteristic scale determination module 805, a feature point main direction determination module 806 and a wide baseline matching module 807.
[0102] The line segment detection module 801 is configured to perform line segment detection on the input image to obtain a straight line set of the input image.
[0103] Here, the line segment detection method can be selected according to actual needs to detect the line segment of the input image, for example...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com