Anti-interference fault-tolerant control method based on E-S sliding-mode observer
A sliding mode observer, fault-tolerant control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
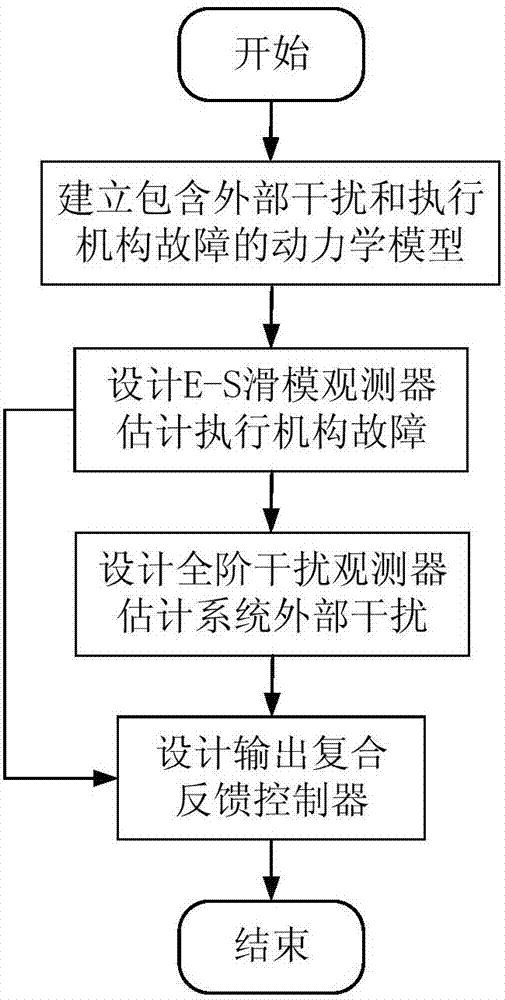
[0054] Such as figure 1 Shown, the concrete realization step of the present invention is as follows (taking " vertical take-off and landing " VTOL aircraft model as example):
[0055] Step 1: For a control system that includes disturbances and faults at the same time, the process of establishing a dynamic model is as follows;
[0056] For the fault disturbance system with disturbance and fault, build its dynamic model, and describe it in the form of state space such as Σ 1 :
[0057]
[0058] Among them, t represents time, x(t) represents the state of the system, is the derivative of the state, the state includes horizontal velocity (kn), vertical velocity (kn), pitch rate (° / s) and pitch angle (°), y(t) represents the system output, and the output includes horizontal velocity (kn), vertical Speed (kn) and pitch angle (°), u (t) is the output of the actuator, the output includes total pitch control and longitudinal cycle pitch control. A, B, and C are known system co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com