Stepless adjusting device applicable to lengths of four limbs of rehabilitation robot
A rehabilitation robot and stepless adjustment technology, applied in the direction of passive exercise equipment, manipulators, gymnastics equipment, etc., can solve the problems of adding product accessories, existing alignment, reducing operation efficiency, etc., and achieve the effect of satisfying comfort and fast and efficient adjustment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to make the objectives, technical solutions, and advantages of the present invention clearer, the following further describes the present invention in detail with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, but not to limit the present invention.
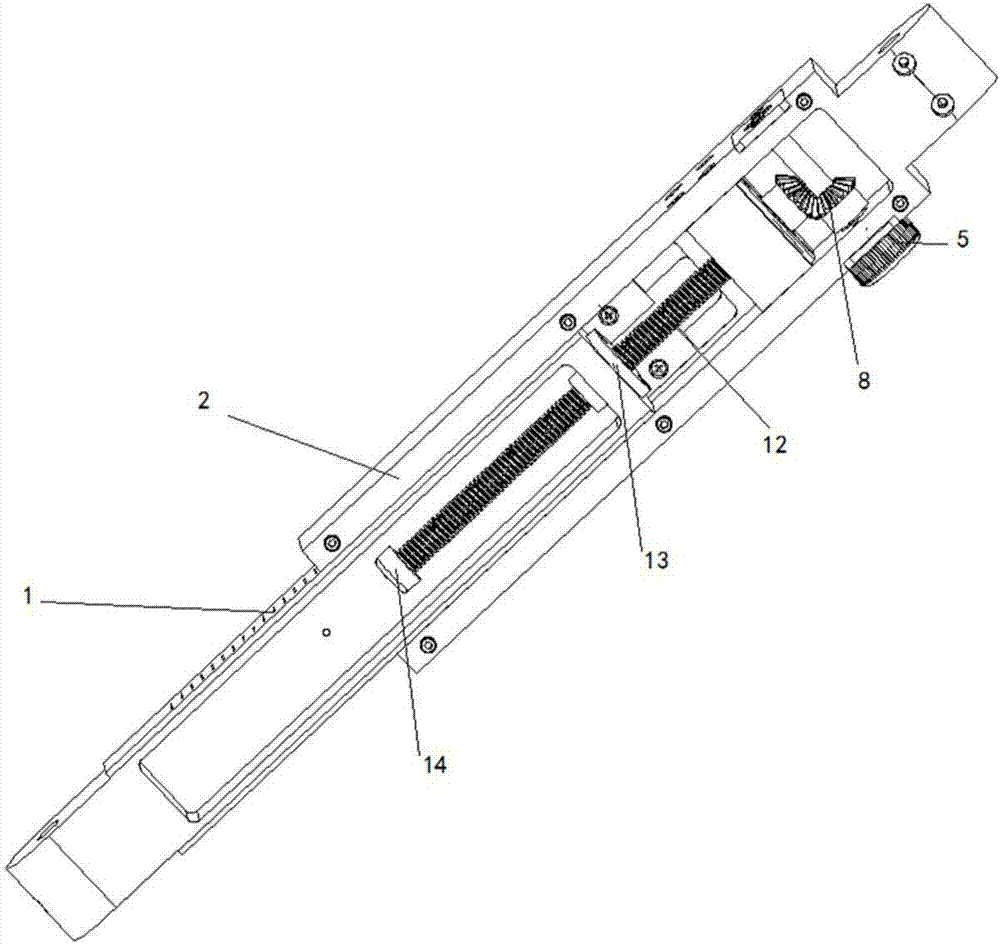
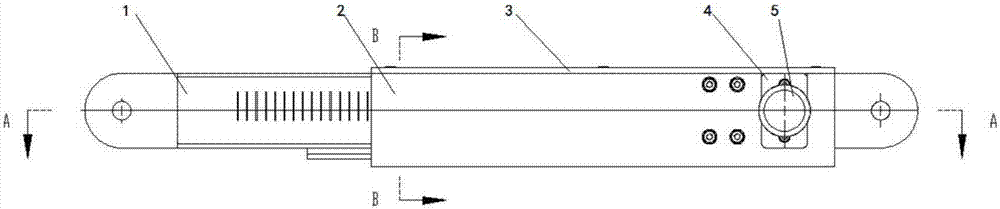
[0023] See figure 1 , The stepless adjustment device suitable for the limb length of the rehabilitation robot of the present invention mainly includes three parts: a fixed rod 2, a sliding rod 1, and a stepless adjustment mechanism. One end of the sliding rod 1 is embedded in the groove of the fixed rod 2 and can move along the length of the fixed rod 2. The infinite adjustment mechanism drives the sliding rod 1 relative to the fixed rod 2 to move along the length of the fixed rod 2.
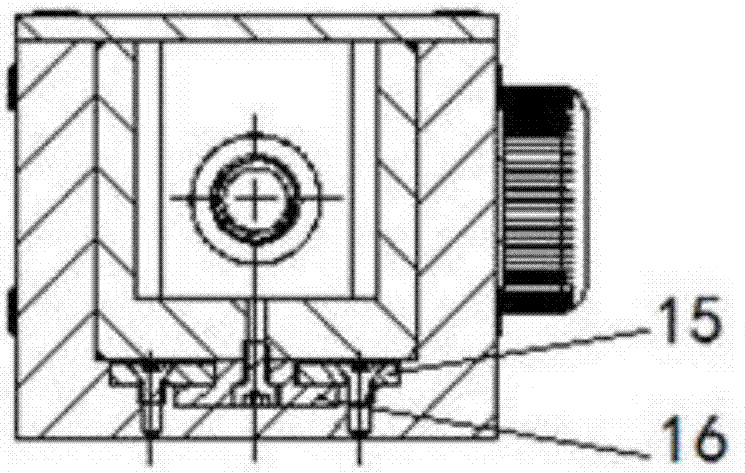
[0024] Please combine figure 2 , image 3 and Figure 4 , The stepless adjustment mechanism mainly includes t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com