Indoor robot positioning method by combining visual odometer and physical odometer
A visual odometry and indoor robot technology, applied in the field of autonomous positioning accuracy of indoor mobile robots, can solve problems such as inability to eliminate, superposition and accumulation, and achieve the effect of ensuring efficiency and real-time performance, satisfying accuracy, and solving the problem of error accumulation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be described in detail below with reference to the drawings and embodiments.
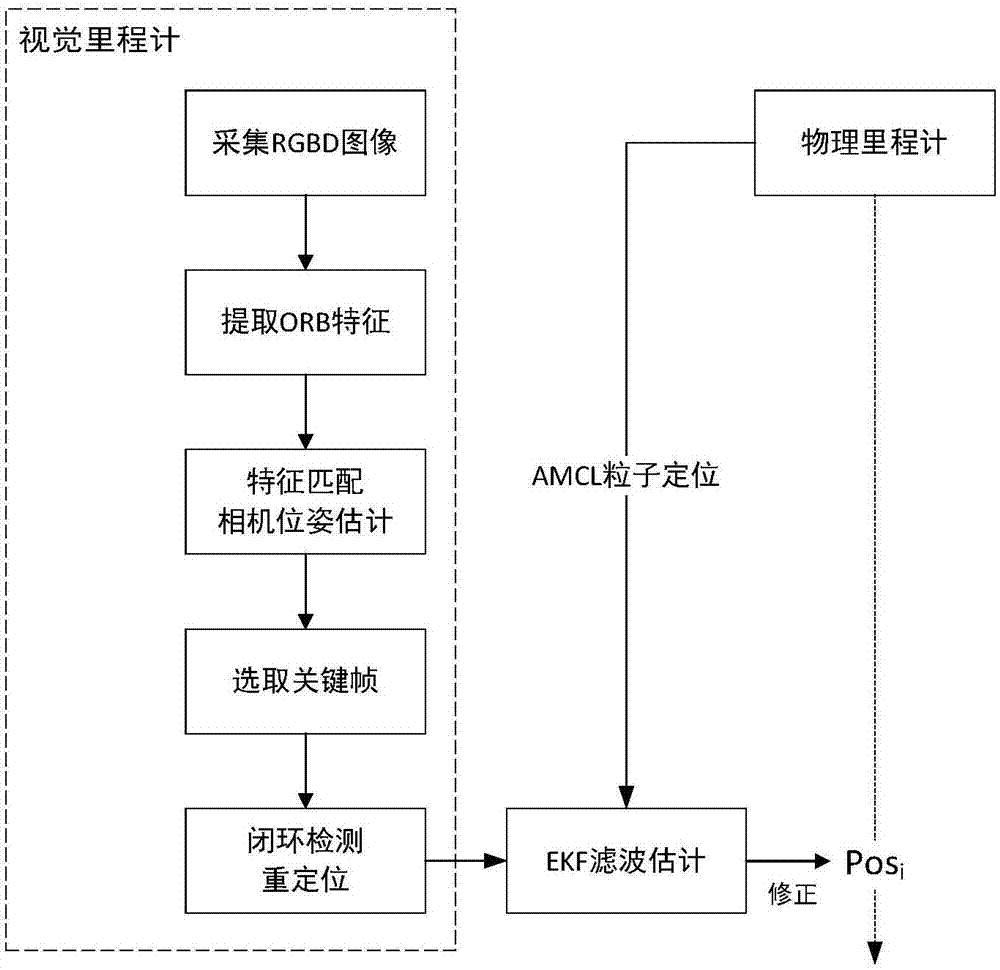
[0019] As attached figure 1 with 2 As shown, the present invention provides a
[0020] Step 1. Use ASUS depth camera Xtion to acquire color and depth images;
[0021] Step 2. Extract ORB features from the two consecutive images obtained, calculate the descriptor of each orb feature point, and estimate the camera pose change through feature matching between adjacent images: 1) Combine the depth image to obtain the effective feature point 2) According to the orb feature and the depth value of the feature point, the RANSAC algorithm eliminates the wrong point pair; 3) The rotation matrix R and the translation matrix T between adjacent images are obtained to estimate the pose transformation of the camera;
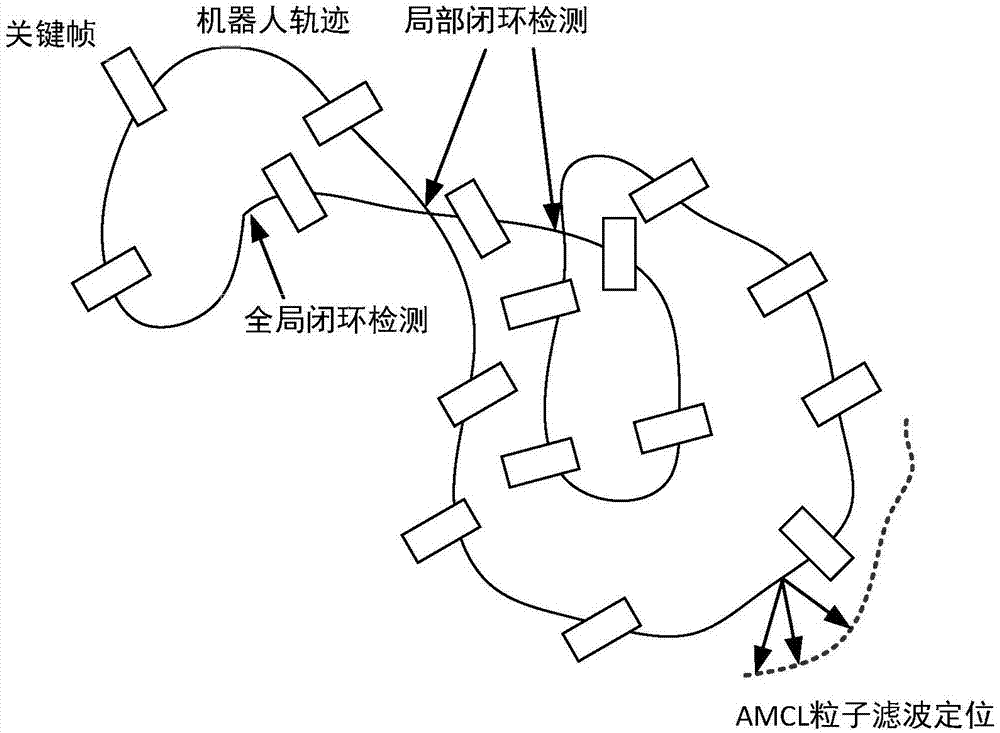
[0022] Step 3. During the movement of the robot, select the image with the most common feature points and the best matching among the adjacent frames as the key frame, and s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com