Human-robot virtual reality interactive control system based on inertial motion capture
A technology of interactive control and human-computer interaction, which is applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., can solve the problems of uneconomical cost performance, difficult control of development interface, and high price, and achieve intuitive and reliable interaction, friendly interaction mode, and equipment low cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
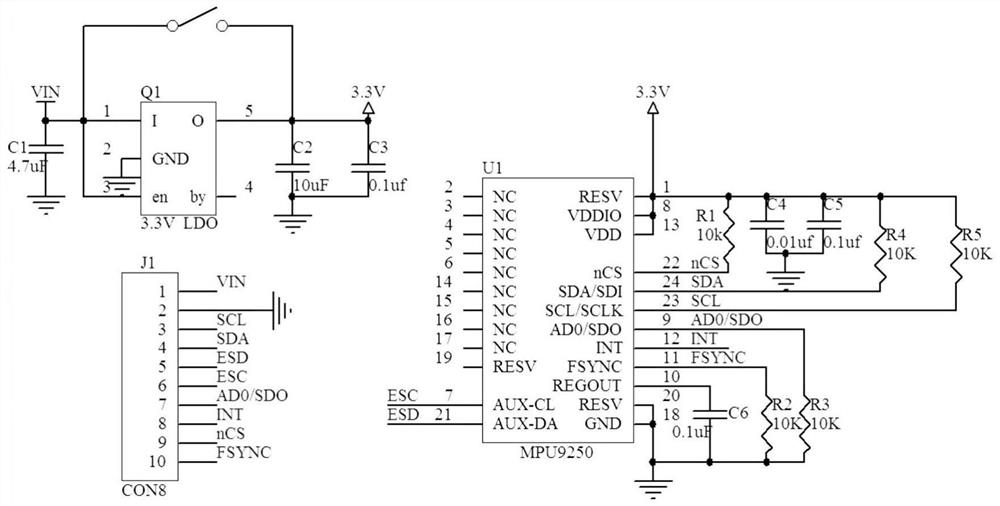
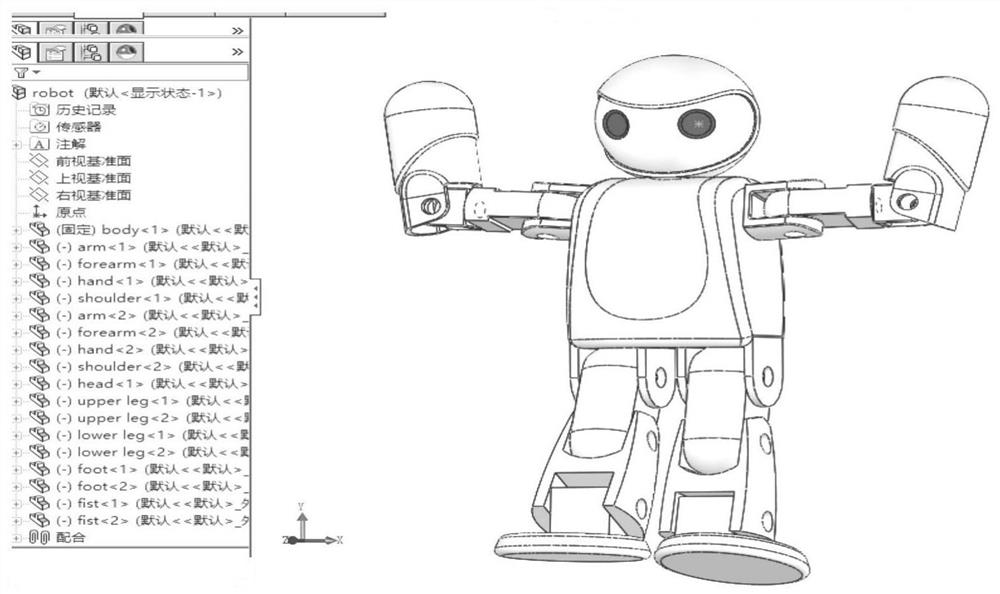
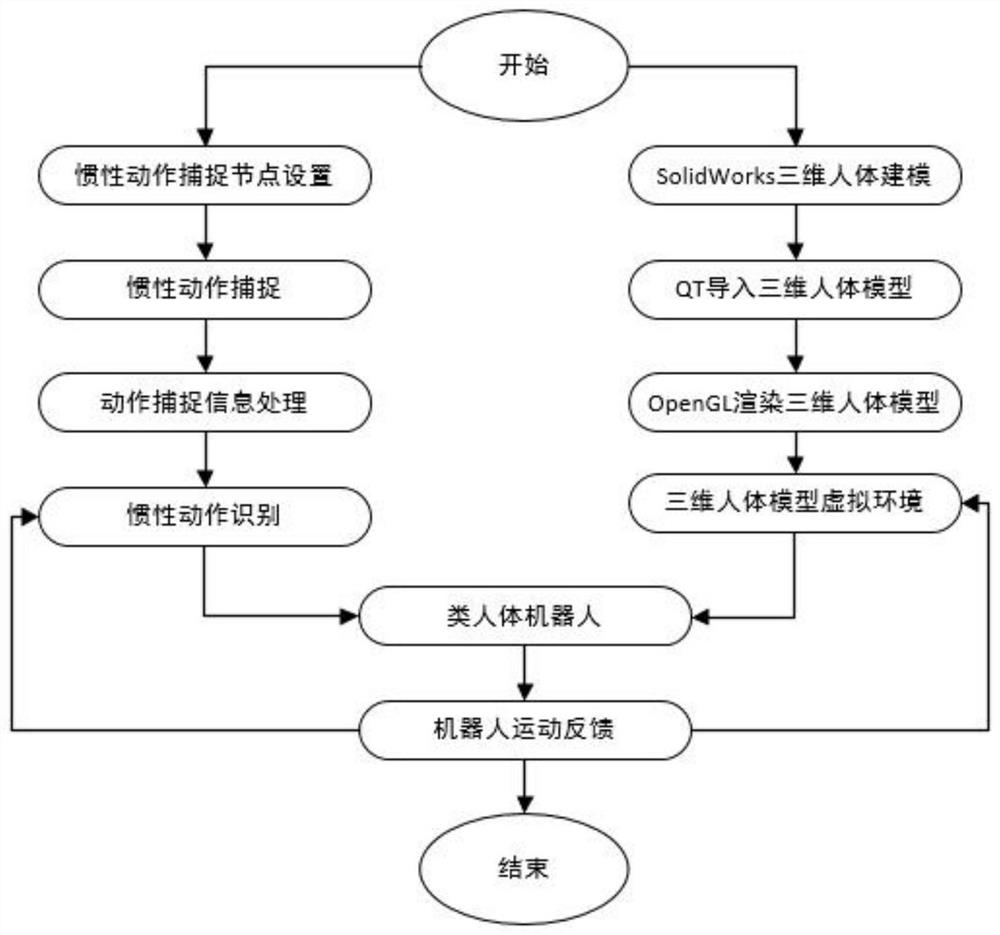
[0031] In order to deepen the understanding of the present invention, the following figure 2 The node scene schematic diagram of , as an example, and combined with figure 1 , image 3 , Figure 4 , Figure 5 Describe the specific implementation steps of the present invention:
[0032] The invention discloses a human-robot virtual-real interactive control system based on inertial motion capture, including an action acquisition module as shown in the figure, an action synthesis module, and a human-machine interaction module such as. according to Figure 4 To design the motion acquisition module, use the MPU9250 inertial motion capture sensor to collect the original data of human body posture, and realize the real-time acquisition of human body movements; the motion synthesis module uses the Kalman filter algorithm to calculate the posture of the human body, and the human-computer interaction module uses Labview to analyze the human body. The virtual environment and the rea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com