Unmanned vehicle path planning and tracking control method based on differential flatness and active-disturbance rejection
A technology of differential flatness and path planning, which is applied in two-dimensional position/channel control and other directions, and can solve the problem that the third-order polynomial approximation effect is not as good as it is
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention is described further below.
[0016] A kind of unmanned vehicle path planning and tracking control method based on differential flatness and active disturbance rejection of the present invention, comprises the following steps:
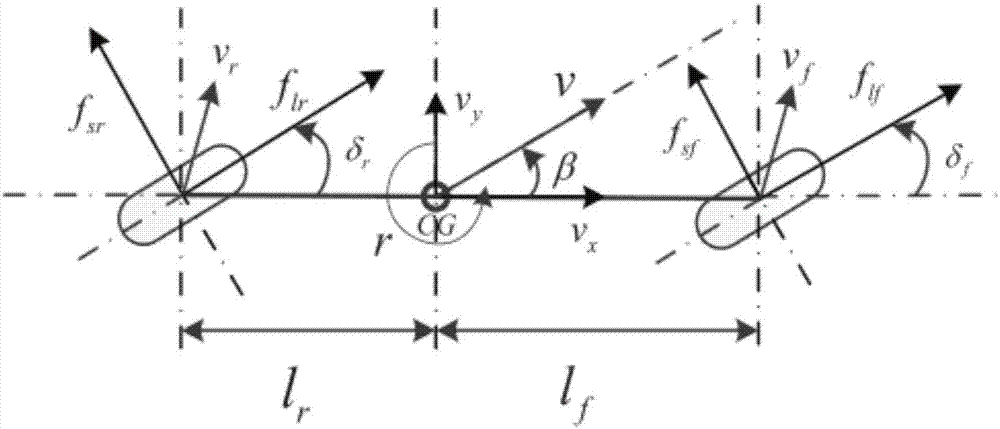
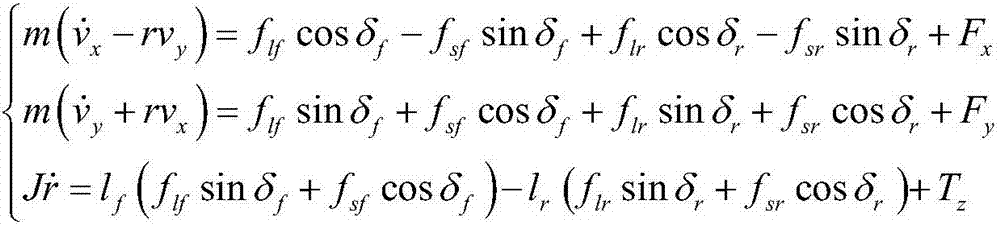
[0017] Step 1: Establish a three-degree-of-freedom underactuated monorail control model for a four-wheel-steering vehicle, described as follows:
[0018]
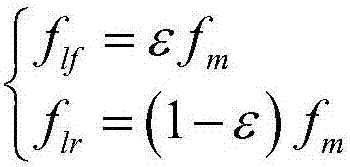
[0019] Among them, v x ,v y , r are the longitudinal, lateral and yaw angular velocities of the four-wheel steering vehicle respectively, f lf and f lr is the longitudinal force caused by the engine, braking torque and friction, given by:
[0020]
[0021] Among them, ε is the longitudinal comprehensive force f m The constant value distribution coefficient of the longitudinal force on the front and rear wheels, its value ranges from 0, that is, a rear-wheel drive vehicle, to 1, that is, a front-wheel drive vehicle. Here, considering the situation that the vehi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com