Simulation method, simulation device and robot simulation system
A simulation method and robot technology, applied in the field of robot online simulation method, simulation device, and robot simulation system, can solve the problems of large errors between simulation modeling and actual products, low real-time performance and authenticity, and achieve low cost and general use. Strong and authentic effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The following will be combined with Figures 1 to 4 The present invention is further described, but it should not be used to limit the protection scope of the present invention. .
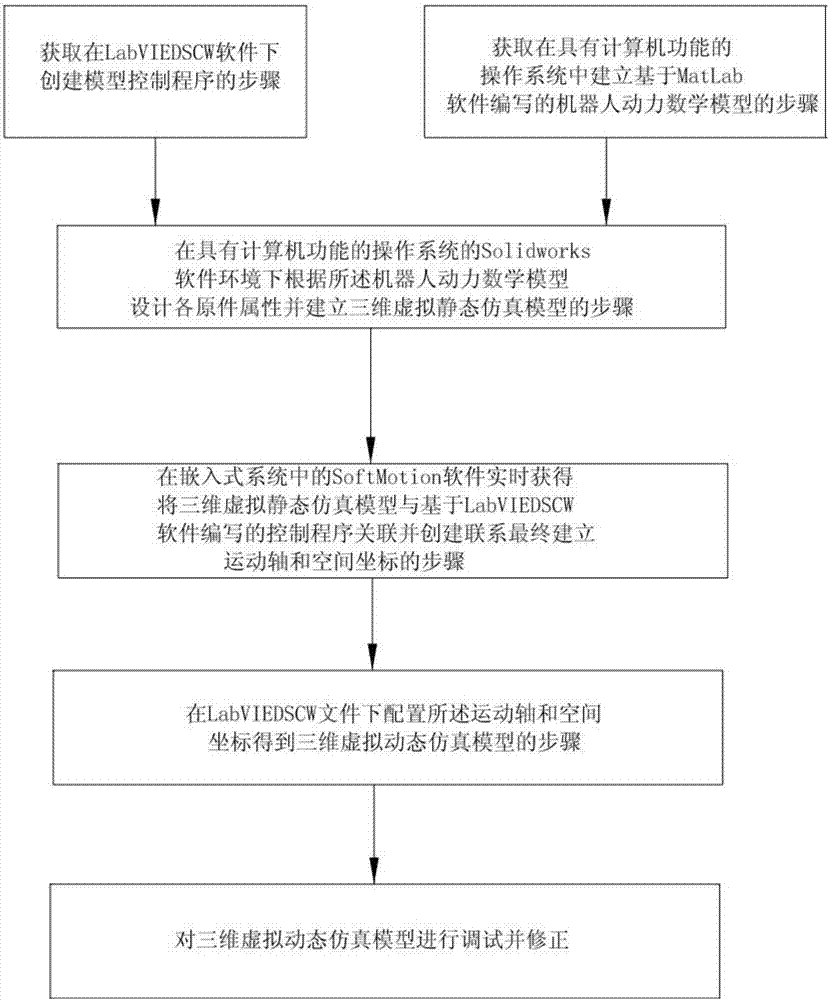
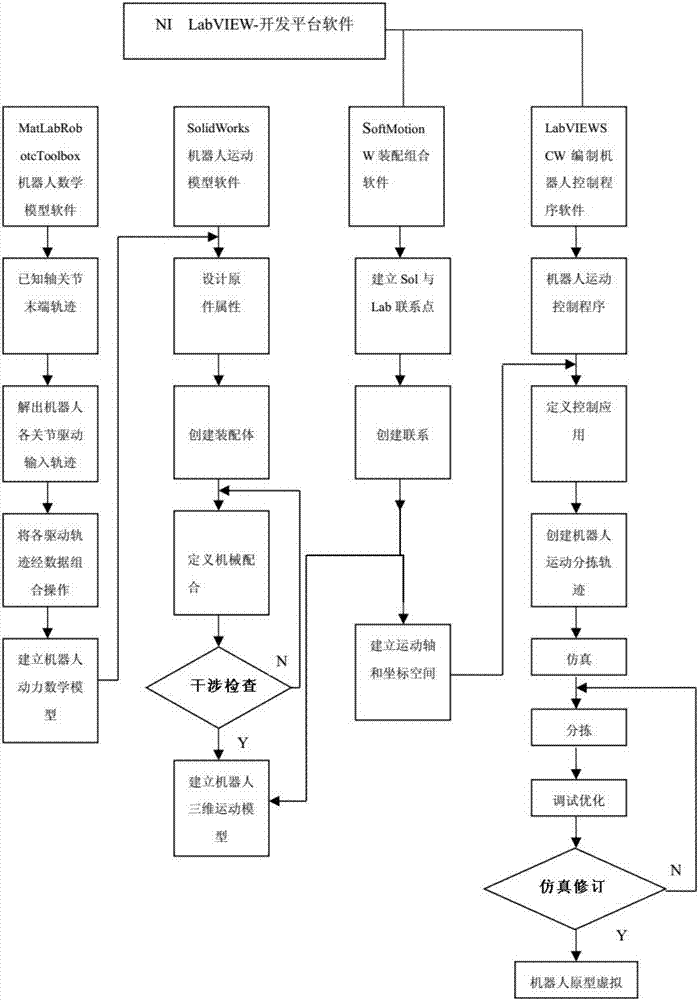
[0049] The technical scheme of the present invention combines the advantages of LabVIEW software, LabVIEDSCW software, MatLab software, Solidworks software and SoftMotion software, and uses LabVIEW software as a basis to carry out robot simulation. Robot simulation for industrial applications.
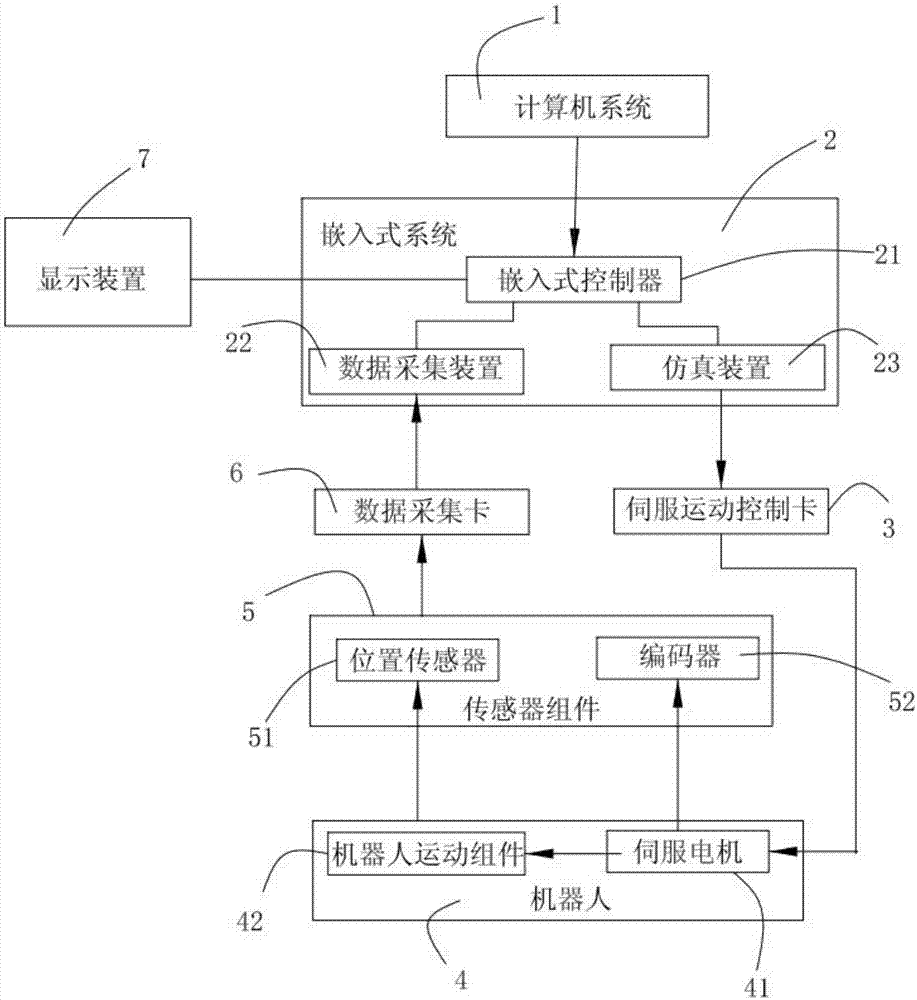
[0050] Specifically, the robot simulation system of this embodiment includes a computer system 1 , an embedded system 2 , a servo motion control card 3 , a robot 4 and a sensor component 5 . Various simulation models and control programs are designed by the computer system 1 , and then the embedded system 2 receives the simulation models and control programs for simulation and motion control of the robot 4 .
[0051]The detailed computer system 1 can be preferably a PC computer, and the PC compute...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com