EtherCAT-based multi-axis synchronization control device and method
A multi-axis synchronization and control device technology, applied in the direction of program control, computer control, general control system, etc., can solve the problems of low openness, high price, and dependence on imported EtherCAT equipment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] In order to better understand the present invention, the present invention will be further described below in conjunction with the accompanying drawings.
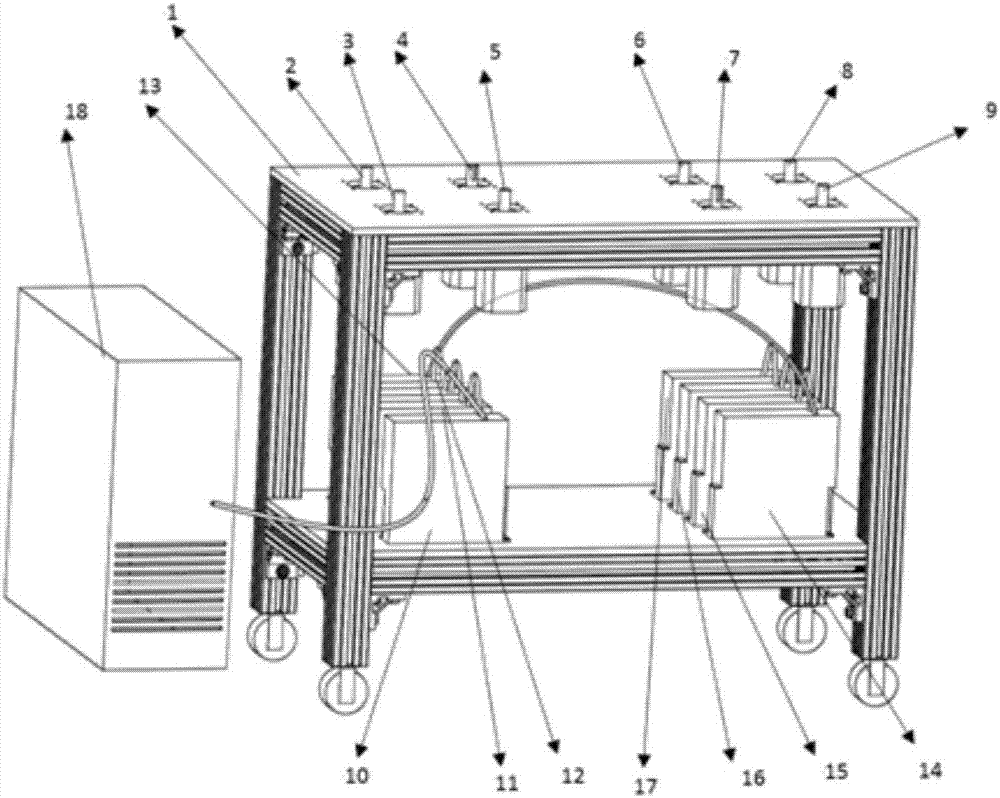
[0075] Such as figure 1 As shown, a multi-axis synchronous control device based on EtherCAT, including the mechanical body part, AC servo drive part and control part:
[0076] The mechanical body part includes:
[0077] Supporting platform 1 and several AC servo motors 2-9 installed on said supporting platform 1;
[0078] The AC servo drive part includes:
[0079] A number of AC servo drive slave stations 10-17 connected one-to-one with the AC servo motors 2-9, the AC servo drive slave stations 10-17 work in the synchronous position mode, and are used to output the position according to the obtained pulse signal, and Respectively output the photoelectric encoder value, angular velocity value and torque value corresponding to the AC servo driver;
[0080] The control section includes:
[0081] The PC master stati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com