Intersection condition-orientated unmanned vehicle trajectory planning method based on Bezier curve and VFH algorithm
A technology for trajectory planning and unmanned vehicles, which is applied in the directions of motor vehicles, transportation and packaging, two-dimensional position/channel control, etc., and can solve problems such as unreachable, oscillating, and uneven trajectory of unmanned vehicles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The present invention will be further described below in conjunction with accompanying drawing.
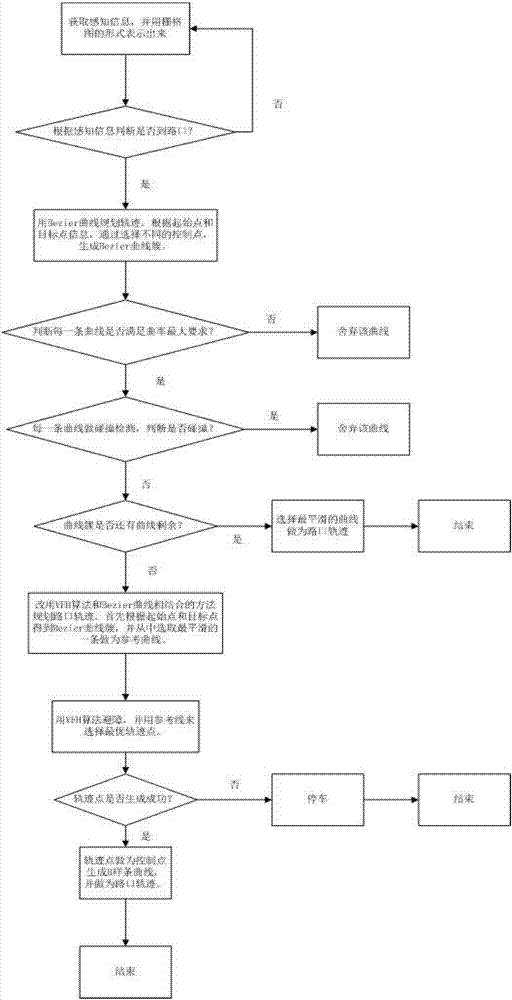
[0054] see figure 1 , the intersection motion planning method based on hierarchical thinking is divided into two parts, including the following steps:
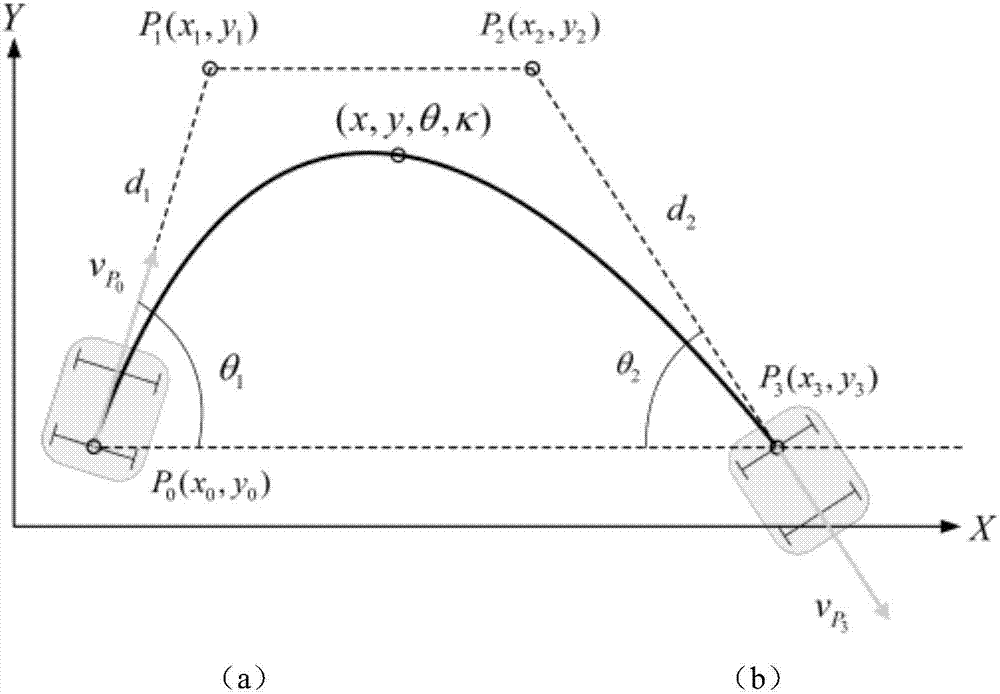
[0055] 1) Plan the Bezier curve according to the pose information of the starting point and the target point, the specific steps are as follows:
[0056] (1a) Obtain the pose information x, y, θ (x coordinate, y coordinate, orientation angle) of the starting point and the target point from the perception point;
[0057] (1b) Find suitable, multiple combinations of control points to generate multiple Bezier curves;
[0058] The mathematical model of the Bezier curve is shown below.
[0059] Bezier curve is a special polynomial curve, assuming n+1 control points P i (i=0,1,....,n), then the n-order Bezier curve can be expressed as:
[0060]
[0061] where b i,n (t) is an n-order Bernstein basis polynomial, and its ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com