Indoor locating data processing method and apparatus of unmanned aerial vehicle
A data processing device and unmanned aerial vehicle technology, applied in the field of unmanned aerial vehicles, can solve the problems of inaccurate positioning data and high positioning cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
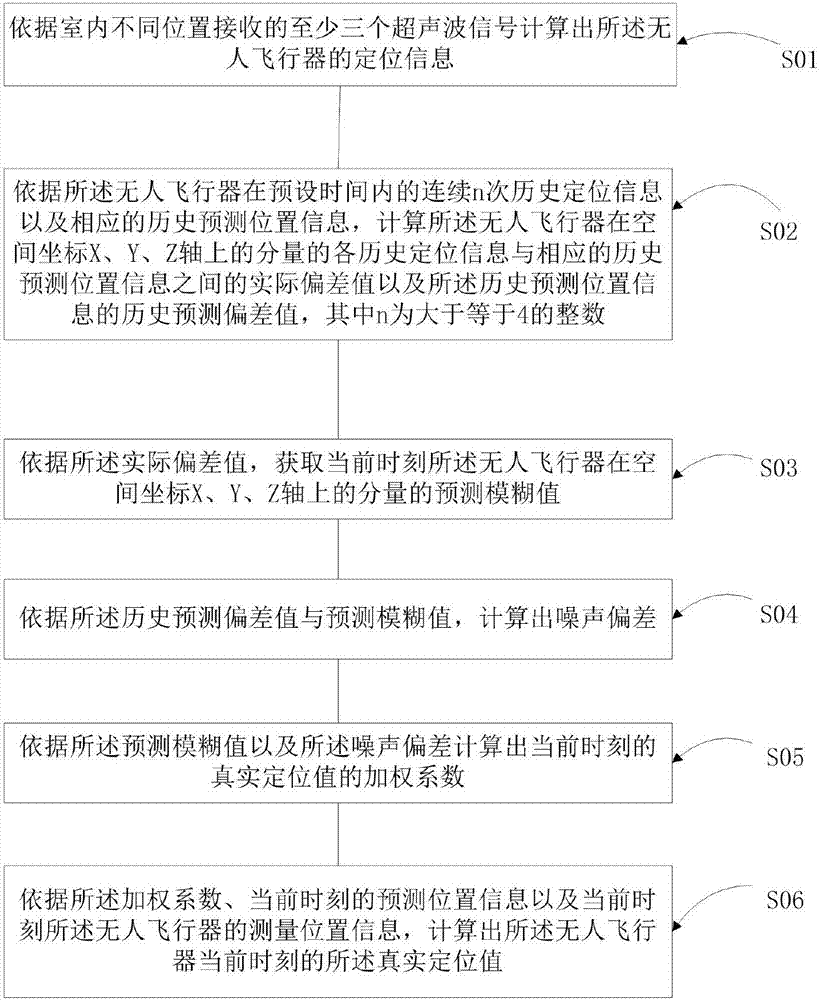
[0059] See figure 1 , the present invention provides a method for processing indoor positioning data of an unmanned aerial vehicle, comprising the following steps:
[0060] S01 Calculate the positioning information of the UAV according to at least three ultrasonic signals received at different positions in the room;
[0061] S02 Calculate the historical positioning information of the components of the unmanned aerial vehicle on the space coordinates X, Y, and Z according to the n consecutive historical positioning information of the unmanned aerial vehicle within a preset time and the corresponding historical predicted position information The actual deviation value from the corresponding historical predicted position information and the historical predicted deviation value of the historical predicted position information, wherein n is an integer greater than or equal to 4;
[0062] S03 According to the actual deviation value, obtain the predicted fuzzy value of the component...
Embodiment approach 2
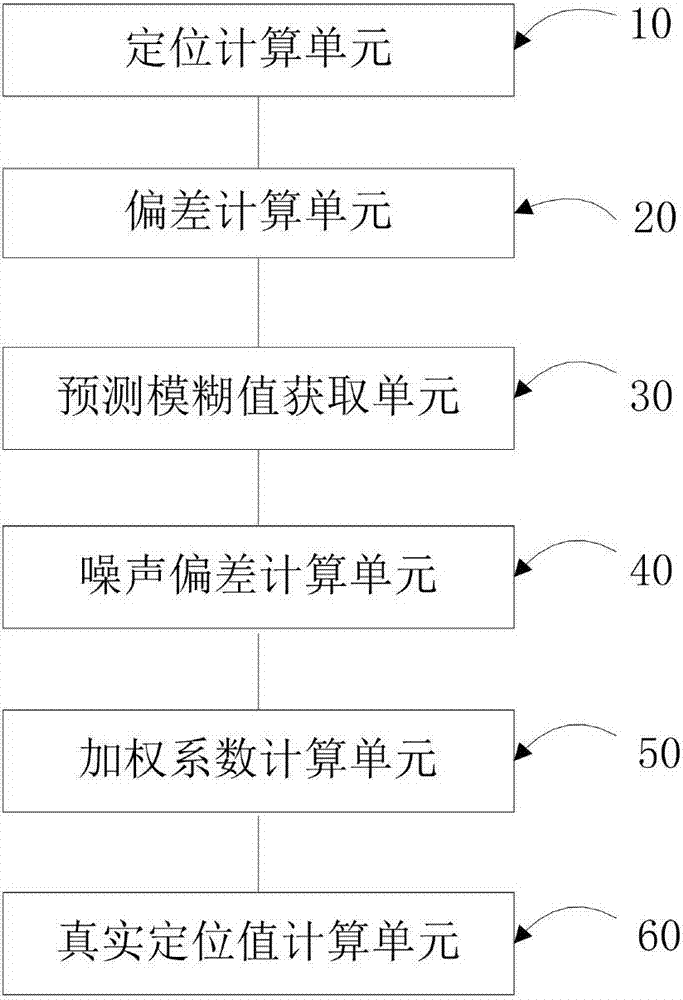
[0117] like figure 2 As shown, the present invention also provides an indoor positioning data processing device for an unmanned aerial vehicle, and the indoor positioning data processing device for an unmanned aerial vehicle includes:
[0118] The positioning calculation unit 10 is used to calculate the positioning information of the unmanned aerial vehicle according to at least three ultrasonic signals received at different positions in the room;
[0119] The deviation calculation unit 20 is used to calculate the position of the unmanned aerial vehicle on the space coordinates X, Y, and Z axes according to the n consecutive historical positioning information of the unmanned aerial vehicle within a preset time and the corresponding historical predicted position information. The actual deviation value between each historical positioning information of the component and the corresponding historical predicted position information and the historical predicted deviation value of t...
Embodiment approach 3
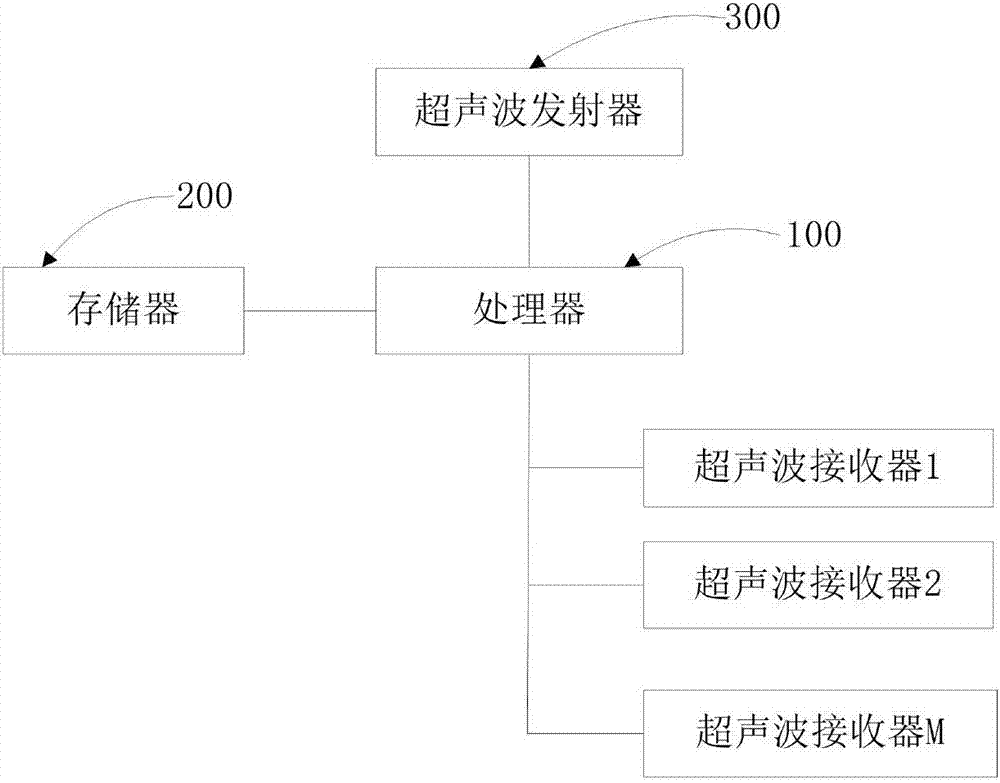
[0136] like image 3 As shown, the present invention also provides an indoor positioning data processing device for an unmanned aerial vehicle, the unmanned aerial vehicle is provided with an ultrasonic transmitter 300, and at least three ultrasonic receivers are distributed in different positions in the room, such as ultrasonic receiver 1, Ultrasonic receiver 2 and ultrasonic receiver 3, ultrasonic receiver M. The ultrasonic receiver receives the ultrasonic signal transmitted by the ultrasonic transmitter 300, and the UAV also includes: an indoor positioning data processing device for the UAV, and the indoor positioning data processing device for the UAV further includes: a processor 100 and memory 200, the processor invokes the program instructions stored in the memory to implement the following steps:
[0137] S01 Calculate the positioning information of the UAV according to at least three ultrasonic signals received at different positions in the room;
[0138] S02 Calcul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com