A vertical/horizontal/vertical anthropomorphic collaborative control method for off-road electric drive unmanned vehicles
An unmanned vehicle and cooperative control technology, applied in vehicle position/route/height control, non-electric variable control, two-dimensional position/channel control, etc., to achieve the effect of improving the comprehensive performance of autonomous driving and improving the performance of the control system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
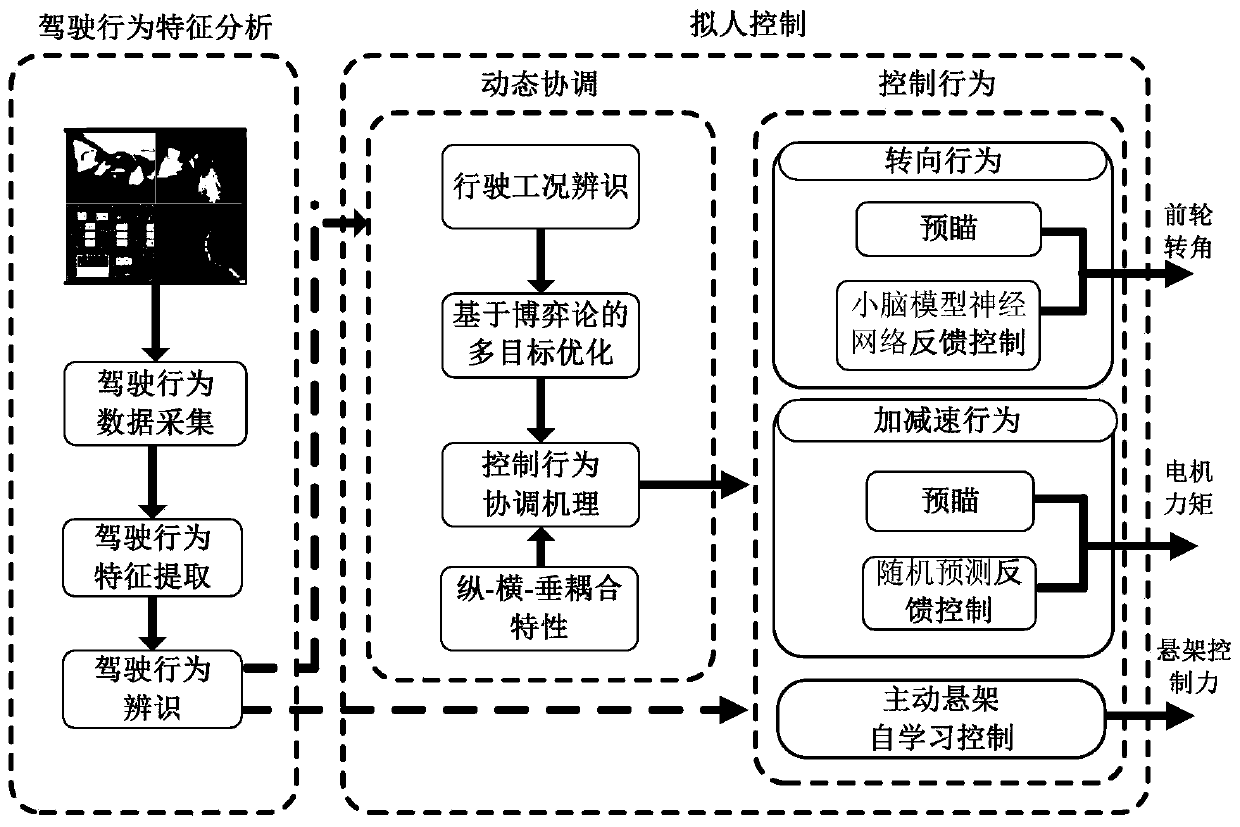
[0018] figure 1 As shown, the present invention first acquires information through multi-source sensors, then analyzes the driver’s behavioral characteristics, and then designs a vertical / horizontal / vertical coupling control strategy for off-road electric drive unmanned vehicles to achieve optimal dynamics of off-road electric drive unmanned vehicles. control. The specific embodiments of the present invention will be described in detail below in conjunction with the technical solutions and accompanying drawings.
[0019] Step 1 Aiming at the complex and changeable roads in the unstructured environment, multi-factor interference and other characteristics, an environmental feature extraction method based on fusion of vision and radar information is proposed.
[0020] Step 1.1 Use the CCD sensor to collect the road image in front of the vehicle, and use the laser sensor to detect whether there are raised obstacles in the road environment.
[0021] Step 1.2 Design an image enhan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com