Input Saturation Adaptive Hierarchical Control System and Method for Overdrive Driverless Vehicle
A self-driving car and hierarchical control technology, applied in the direction of biological neural network models, can solve problems such as poor control effect and damage to the stability of the closed-loop path control system, and achieve the effect of improving system performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The following embodiments will further illustrate the present invention in conjunction with the accompanying drawings.
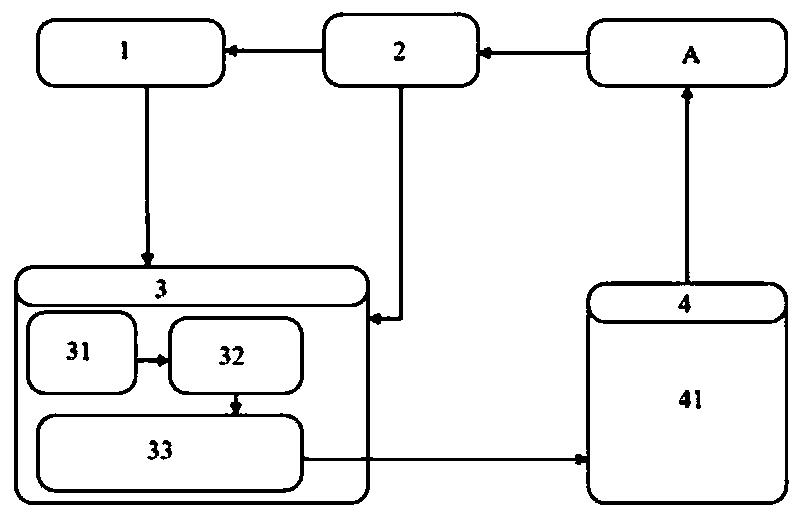
[0032] Such as figure 1 As shown, the embodiment of the over-driven unmanned vehicle input saturation adaptive hierarchical control system is provided with a perception module 1, an input saturation approximation module 2, an adaptive terminal neural sliding mode upper-level control module 3 and a lower-level control distribution module 4; The adaptive terminal neural sliding mode upper-level control module 3 includes a parameter adjustment law 31, a neural network estimator 32 and an adaptive terminal sliding mode controller 33; the lower-level control distribution module 4 includes a control distributor 41 based on tire load rate optimization The output terminal of the perception module 1 is connected to the input terminal of the saturated input approximation module 2, and the output terminal of the saturated input approximation module 2 is connecte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com