Lung puncture robot body mechanism with CT image real-time guiding function
A robot body and CT image technology, applied in the field of robots and radiation therapy robots, can solve the problems of inability to release and re-clamp the puncture needle, infeasible use of the motor, and complex terminal structure, and achieve easy control, reduce quality, and improve The effect of puncture performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be described in detail below with reference to the accompanying drawings and examples.
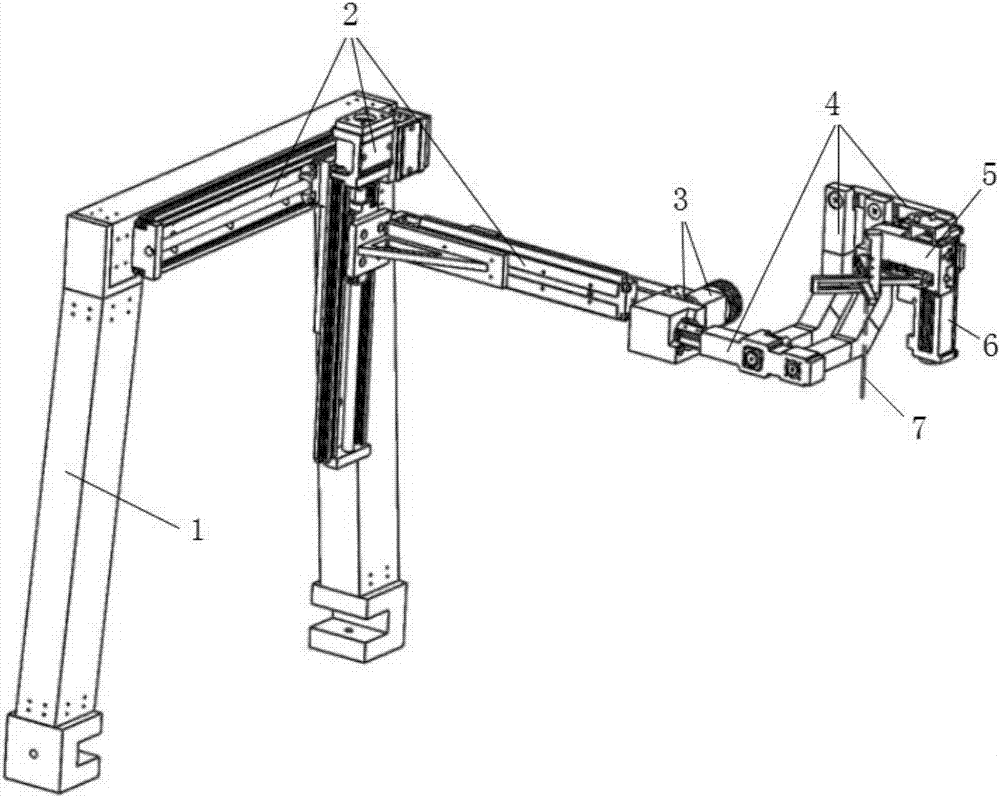
[0034] as attached figure 1As shown, the present invention provides a real-time CT image-guided lung puncture robot body mechanism, which includes a base 1, a three-coordinate sliding platform 2, a corner chuck 3, an RCM mechanism 4, a needle insertion mechanism 6, and a needle clamping mechanism 5;
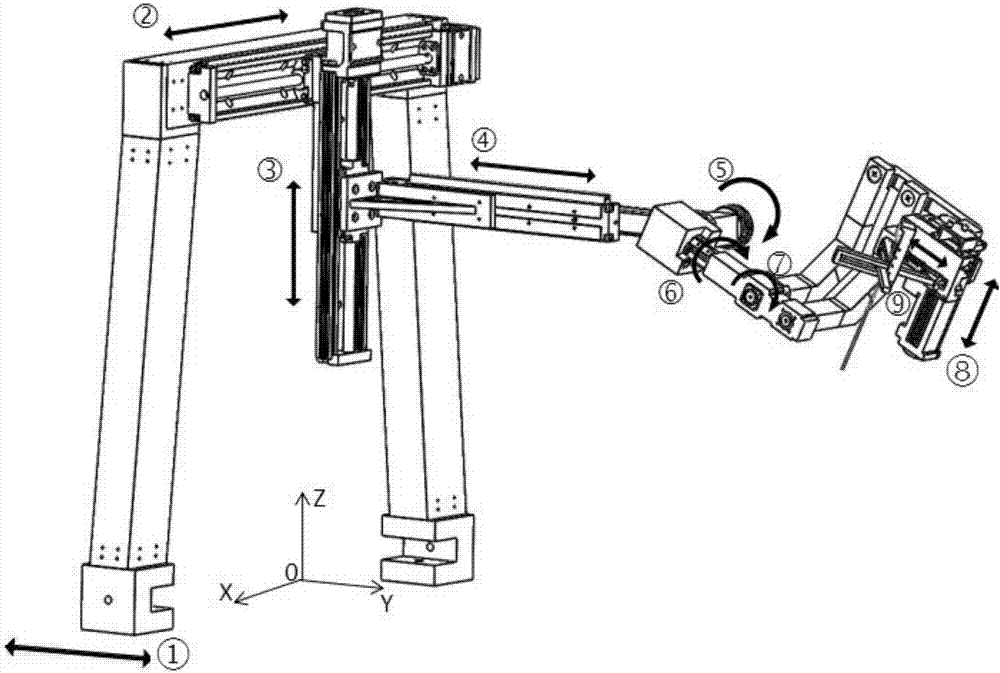
[0035] The overall size of the robot body structure is 616×650×954mm 3 , its functions include: the base is fixed on the scanning bed to carry the load of the robot; the X-axis slide rail is installed horizontally on the base beam, and the Y-axis and Z-axis slide rails are connected in sequence to form an XYZ three-coordinate moving platform 2, which is used to adjust the puncture needle position; the end three mechanisms (RCM mechanism, clamping mechanism, needle mechanism) and the three-coordinate moving platform are connected by a corner chuck, and the a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com