Mobile robot path planning method and device
A mobile robot, path planning technology, applied in the direction of instruments, motor vehicles, transportation and packaging, etc., can solve the problem of unreasonable path specifications of mobile robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
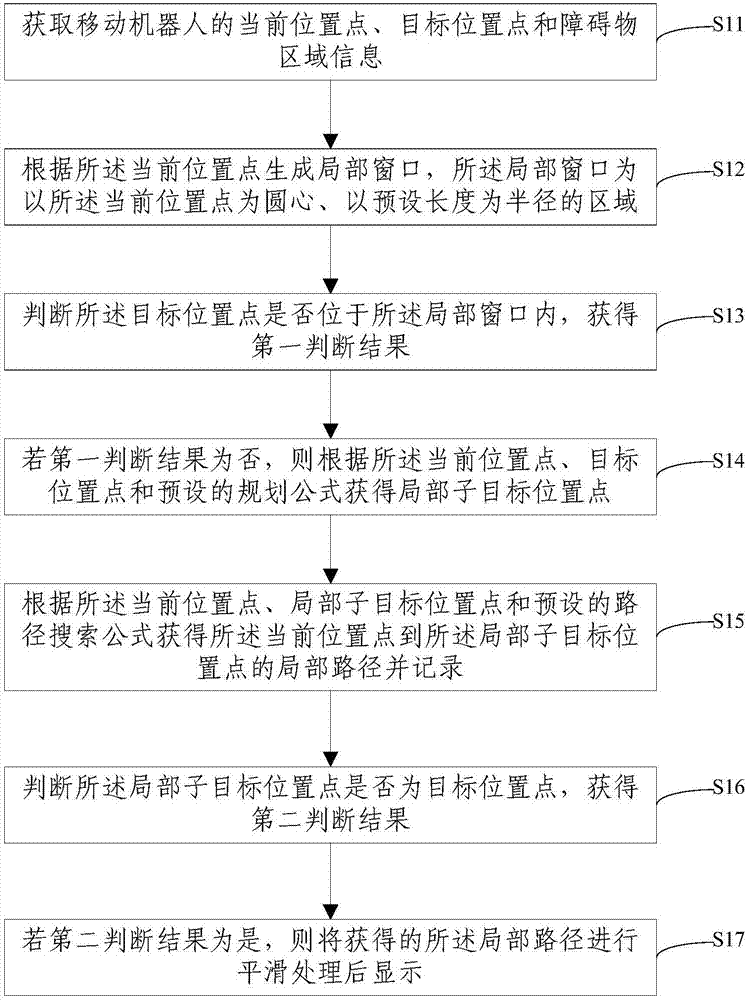
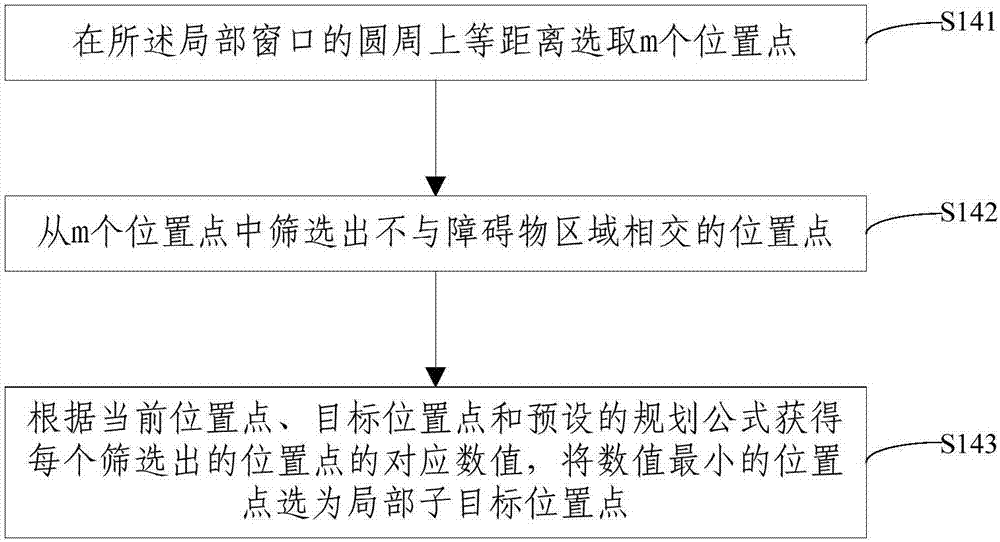
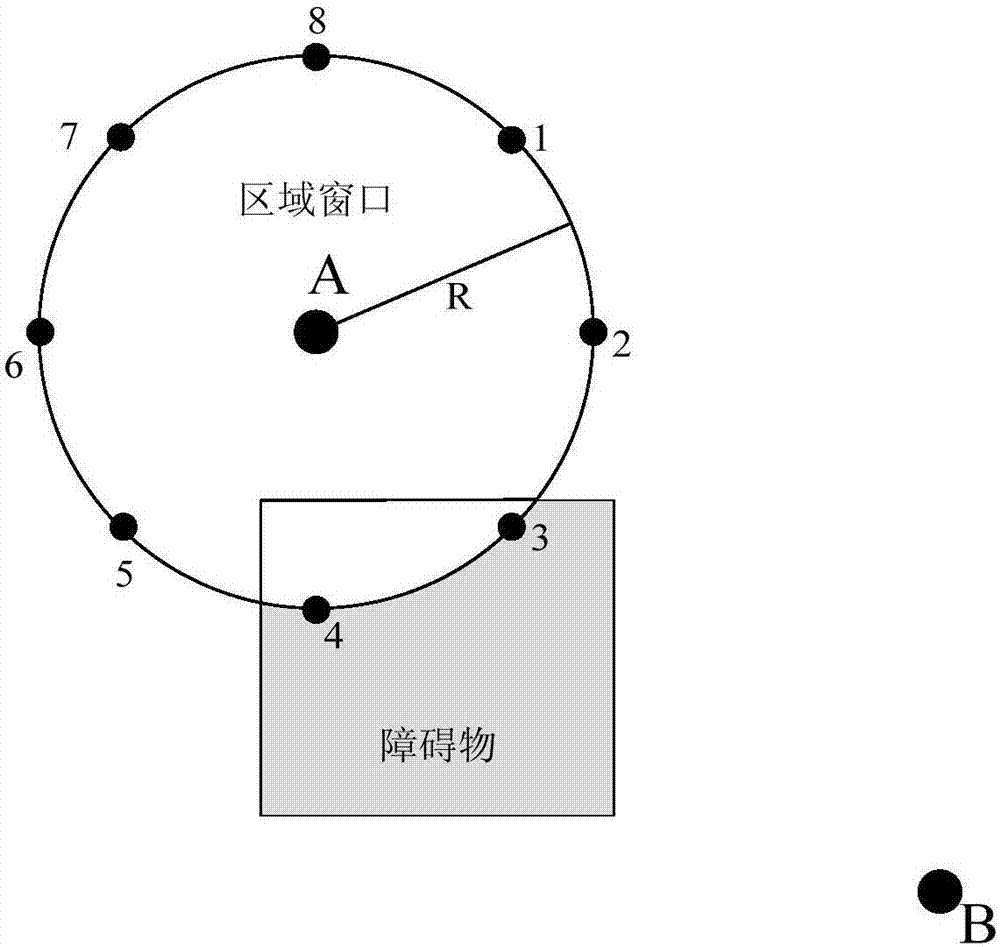
[0068] figure 1 and Image 6 It shows that Embodiment 1 of the present invention provides a mobile robot path planning method, including:
[0069] S11. Obtain the current location point, target location point and obstacle area information of the mobile robot.
[0070] In this step, it should be noted that the current location point may refer to the location point when the mobile robot starts to move, or other location points that appear during the path planning process. The target location point is the location point that the mobile robot will reach after receiving the movement instruction. The obstacle area information may refer to the area occupied by obstacles encou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com