A method and system for real-time tracking of ground moving targets based on UAV
A ground moving target and real-time tracking technology, applied in the field of UAV navigation, can solve the problems of difficult target detection and recognition, and achieve the effect of avoiding the influence of background noise, high matching efficiency, and friendliness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
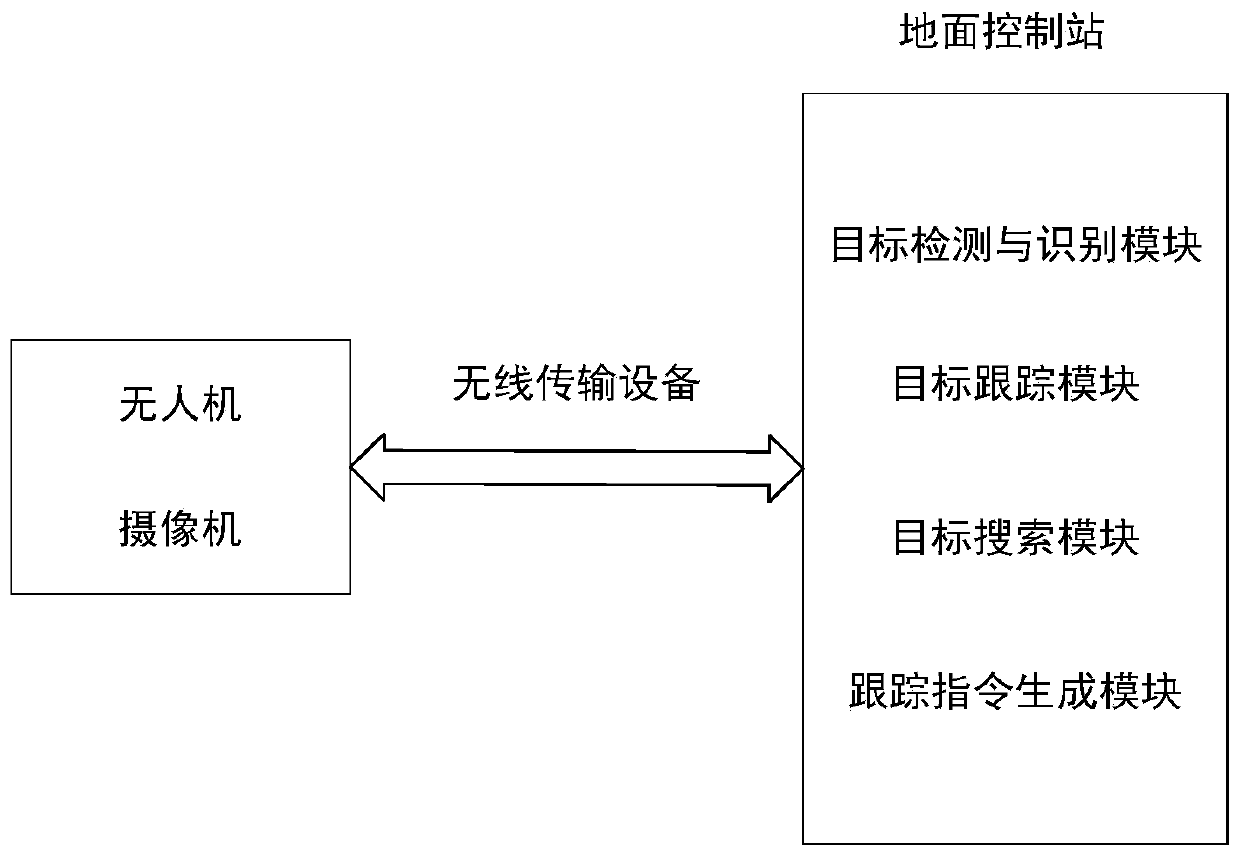
[0059] figure 1 It is a composition diagram of UAV system, which includes UAV, camera, wireless transmission equipment and ground control station. As the carrier of the camera, the UAV expands the shooting range of the camera. The wireless transmission equipment provides a communication method for the download of the image sequence collected by the UAV and the upload of the flight control command of the ground station; the ground control station includes four modules, namely the target detection and recognition module, the target tracking module, the target search module, and the tracking command Generate modules.
[0060] The specific implementation method of UAV system tracking is as follows:
[0061] 1. The UAV uses the pre-planned flight path to patrol according to the flight area specified by the user. The camera downloads the image sequence captured by the wireless transmission device to the target detection and recognition module of the ground control station for proc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com