Double-manipulator multi-freedom-degree mechanical arm
A technology of dual manipulators and manipulators, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve the problems of multi-degree-of-freedom manipulators with complex structures, poor portability, and high cost, and achieve easy promotion, reliable work, and simple structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
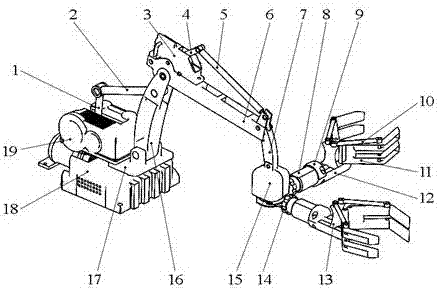
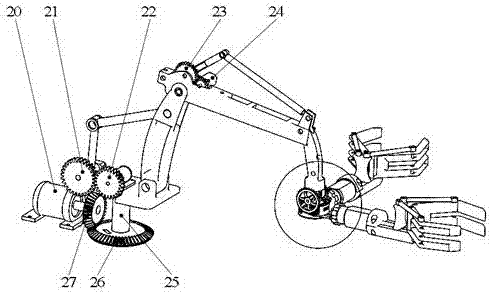
[0028] Embodiment 1: as Figure 1-5 As shown, a multi-degree-of-freedom mechanical arm with double manipulators includes two manipulators, a main arm, a main motor 20, a main motor bevel gear 27, a rotating shaft bevel gear 26, and a rotating shaft 25; The main arm is connected, the main arm is interference fit with the rotating shaft bevel gear 26 through the rotating shaft 25, the rotating shaft bevel gear 26 meshes with the main motor bevel gear 27 and the main motor bevel gear 27 is installed on the main motor 20 shaft.
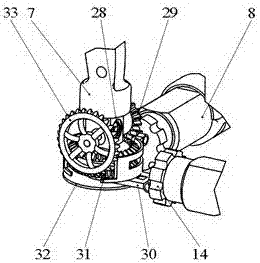
[0029]The main arm includes main arm I crank 1, main arm I connecting rod 2, main arm II motor housing 3, main arm III crank 4, main arm III connecting rod 5, main arm II6, main arm III7, gear train housing 15 , main arm I16, mechanical arm turntable 17, main arm gear train housing 19, main arm I large gear 21, main arm I small gear 22, main arm II large gear 23, main arm II gear motor 24, double output motor 28, Right manipulator bevel gear 29, swivel f...
Embodiment 2
[0031] Embodiment 2: as Figure 1-5 As shown, a multi-degree-of-freedom mechanical arm with double manipulators includes two manipulators, a main arm, a main motor 20, a main motor bevel gear 27, a rotating shaft bevel gear 26, and a rotating shaft 25; The main arm is connected, the main arm is interference fit with the rotating shaft bevel gear 26 through the rotating shaft 25, the rotating shaft bevel gear 26 meshes with the main motor bevel gear 27 and the main motor bevel gear 27 is installed on the main motor 20 shaft.
[0032] The main arm includes main arm I crank 1, main arm I connecting rod 2, main arm II motor housing 3, main arm III crank 4, main arm III connecting rod 5, main arm II6, main arm III7, gear train housing 15 , main arm I16, mechanical arm turntable 17, main arm gear train housing 19, main arm I large gear 21, main arm I small gear 22, main arm II large gear 23, main arm II gear motor 24, double output motor 28, Right manipulator bevel gear 29, swivel ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com