Efficient foot-bottom replacement mechanism for foot-type robot
A robot and sole technology, applied in the field of robotics, can solve the problems of the harsh and changeable service environment of foot robots, the sole structure is difficult to meet the adhesion requirements, and the card slot is easy to invade gravel and soil, etc., so as to improve the rapid adaptability , Improving environmental adaptability and preventing the intrusion of impurities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0011] The specific implementation of the present invention will be described in detail below in conjunction with the accompanying drawings and technical solutions.
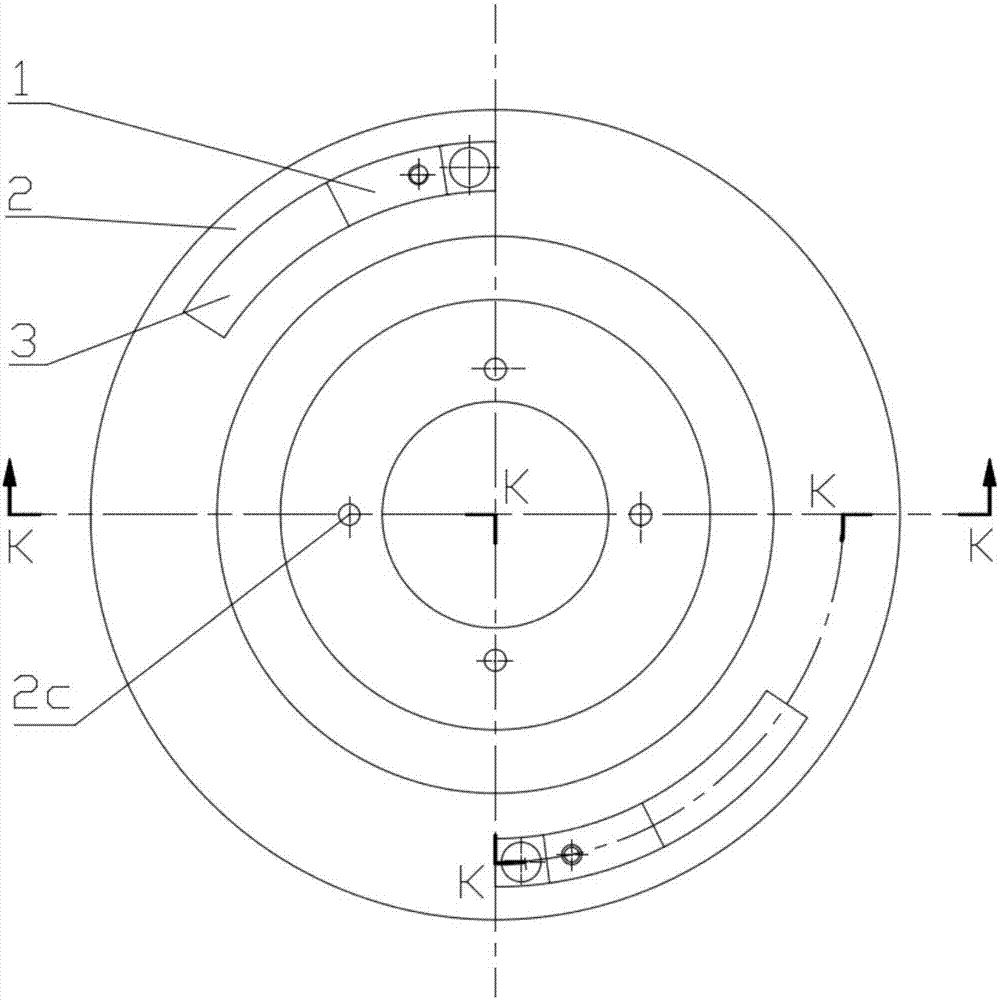
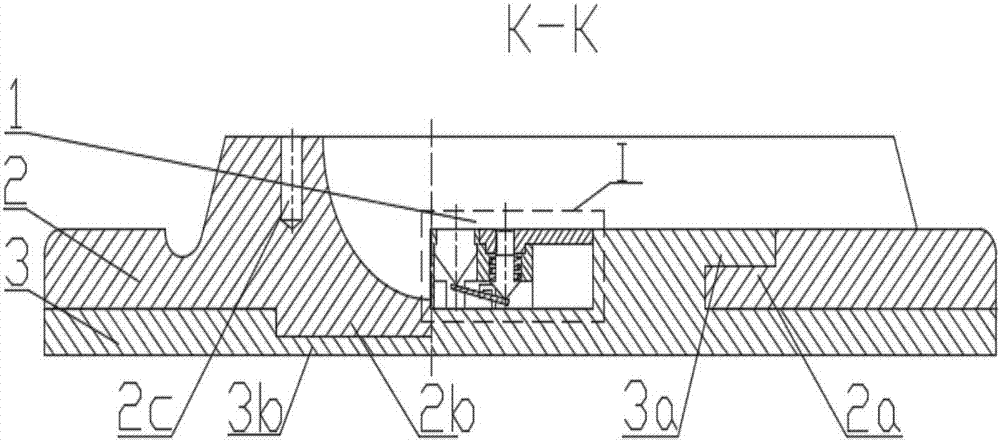
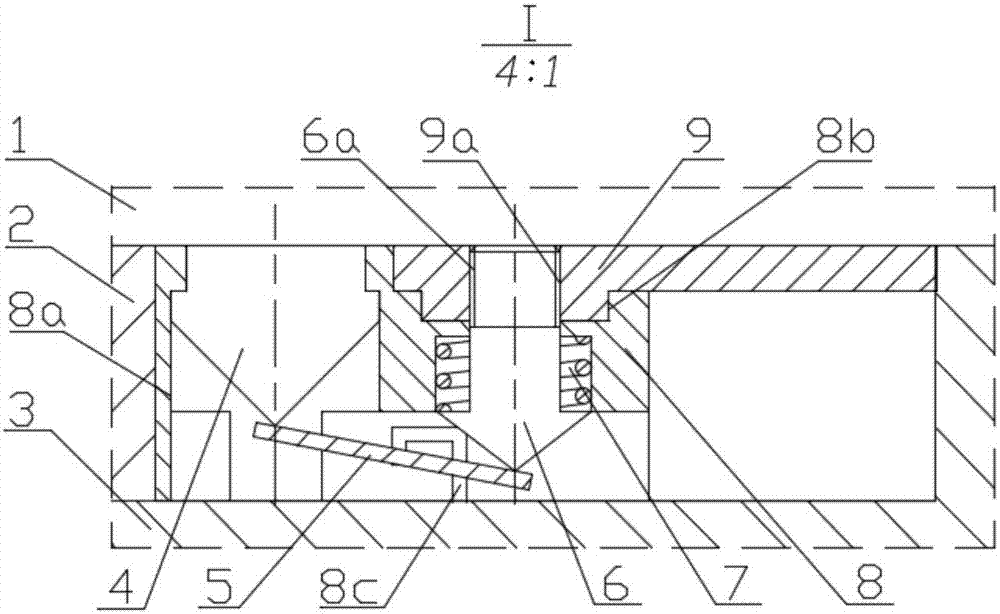
[0012] The high-efficiency foot robot foot replacement mechanism consists of two quick-change lock assemblies 1, a foot base 2 and a foot plate 3, such as figure 1 shown. The foot end base 2 has two slots 2a distributed symmetrically in the circumferential direction, a boss 2b at the bottom, and four threaded holes 2c uniformly distributed circumferentially at the top. Two buckles 3a are symmetrically distributed in the circumferential direction of the sole plate 3, and there is a pit 3b in the middle. The card slot 2a of the foot end base 2 cooperates with the buckle 3a of the sole plate 3, the boss 2b cooperates with the recess 3b, and the quick-change lock assembly and the card slot 2a have an interference fit, such as figure 2 shown. Quick change lock assembly 1 is made up of switch button 4, lever gasket...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com