Tracking system and method for sun tracker
A solar tracker and tracking system technology, applied in the field of solar trackers, can solve problems such as poor accuracy, poor robustness, and slow tracking speed, and achieve the effects of improving control accuracy and speed, and improving slow convergence speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
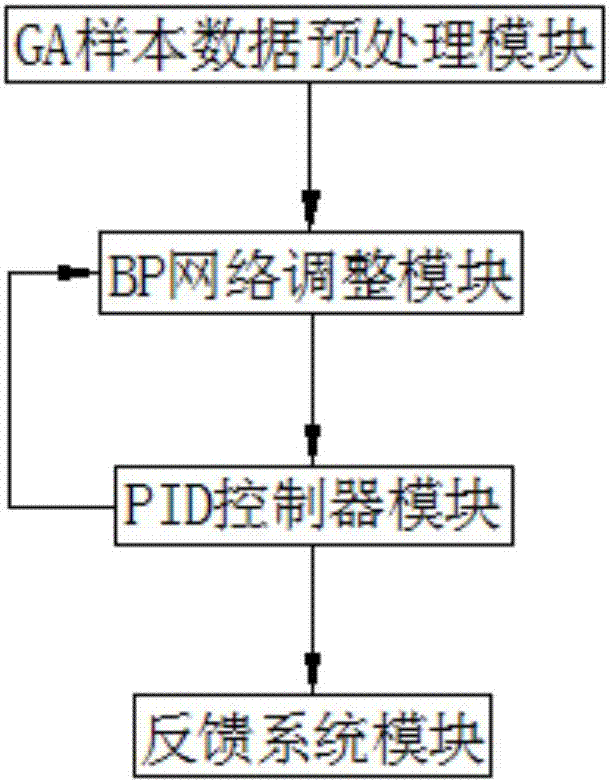
[0050] Such as figure 1 , figure 2 As shown, the tracking system for a sun tracker includes a GA sample data preprocessing module, a BP network adjustment module, a PID controller module, and a feedback system module.
[0051] The GA sample data preprocessing module performs individual optimization according to the sample data, obtains the individual with the greatest fitness and passes it to the BP network adjustment module as the optimal initial value for training;
[0052] On the basis of the optimal initial value, through the reverse transmission of the BP network adjustment module, the weights and thresholds of the hidden layer and the output layer are adjusted, so that the obtained error evaluation function is smaller than the set error threshold, and the adjusted P, I, D parameters;
[0053] The BP network adjustment module transmits the adjusted parameters of P, I, and D to the PID controller module, and the PID controller module controls according to the two degree...
Embodiment 2
[0069] Such as Figure 4 , Figure 5 As shown, the tracking method for a sun tracker is applied to the tracking system provided in Embodiment 1. The algorithm first adjusts the PID parameters with the best tracking performance as the control target, and then adjusts the parameters with the best anti-interference performance as the control target. The specific adjustment steps are as follows:
[0070] Step 1. Randomly generate 2000 sets of data, of which 1500 sets of data are used to train the BP network, and the other 500 sets of data are used to test the BP network, and normalize the data;
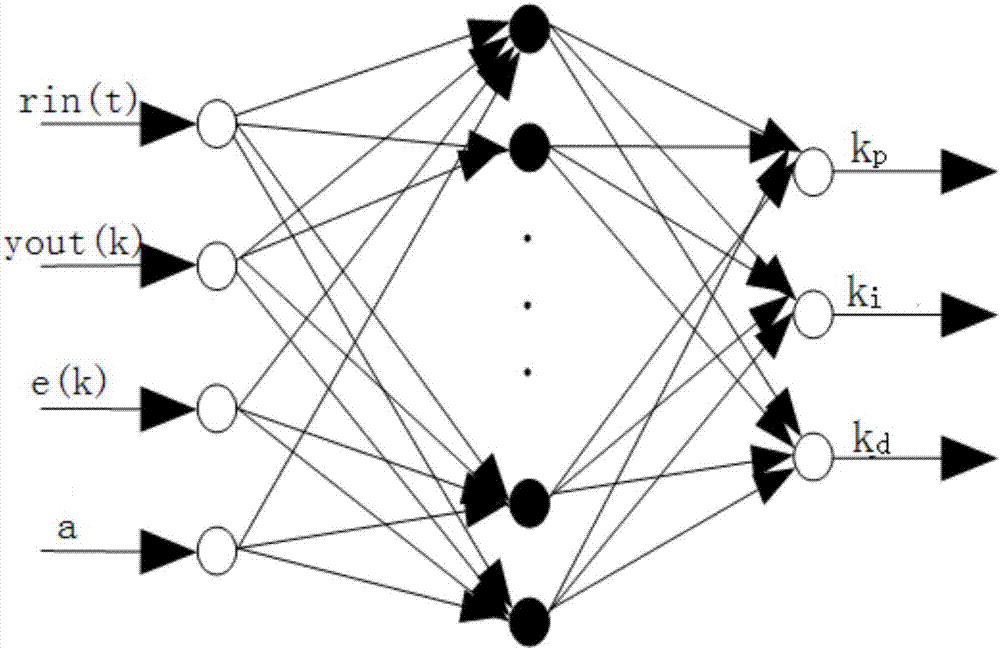
[0071] Step 2. Determine the BP network structure
[0072] First of all, it is determined that the network has three layers in total: input layer, hidden layer, and output layer; among them, there are 4 neurons in the input layer for the specified input signal r in (k), the actual output signal y out (k), the error amount e(k) and the constant a; the three neurons in the output layer ...
Embodiment 3
[0094] This embodiment will introduce the evolution process from the prior art to the algorithm provided in Embodiment 2.
[0095] two degrees of freedom
[0096] The control indicators of the PID control system mainly include: external disturbance suppression and target tracking characteristics. When the one-degree-of-freedom control is used, the two show opposite trends, and achieve the optimal performance at the same time. Two-degree-of-freedom PID (Two degree of freedom PID, 2DOF PID) control is to make the target tracking characteristics optimal and the external disturbance suppression characteristics optimal PID parameters to be adjusted separately, so that the performance of the entire control system can be optimal.
[0097] When using 2DOF PID control, it is necessary to meet the requirements of easy understanding, simple structure, good combination with traditional technology and the ability to inherit its technical achievements. In the control loop for the sun track...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com