Knee joint structure used for lower limb exoskeleton robot
An exoskeleton robot and knee joint technology, applied in the field of robotics, can solve problems such as the bulky structure of the thigh drive sprocket, the inability to adjust the instantaneous center of rotation, and the inability of users to provide assistance for sitting and standing.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in detail below in conjunction with the accompanying drawings.
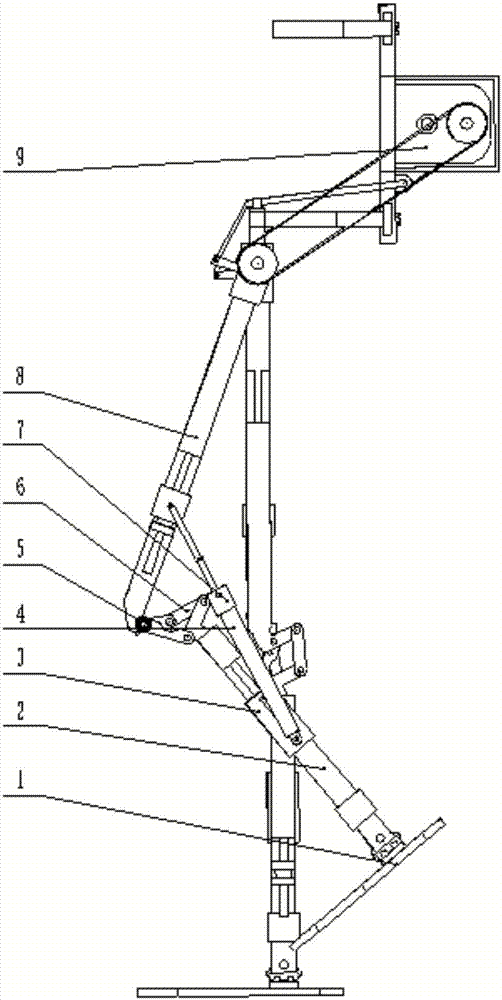
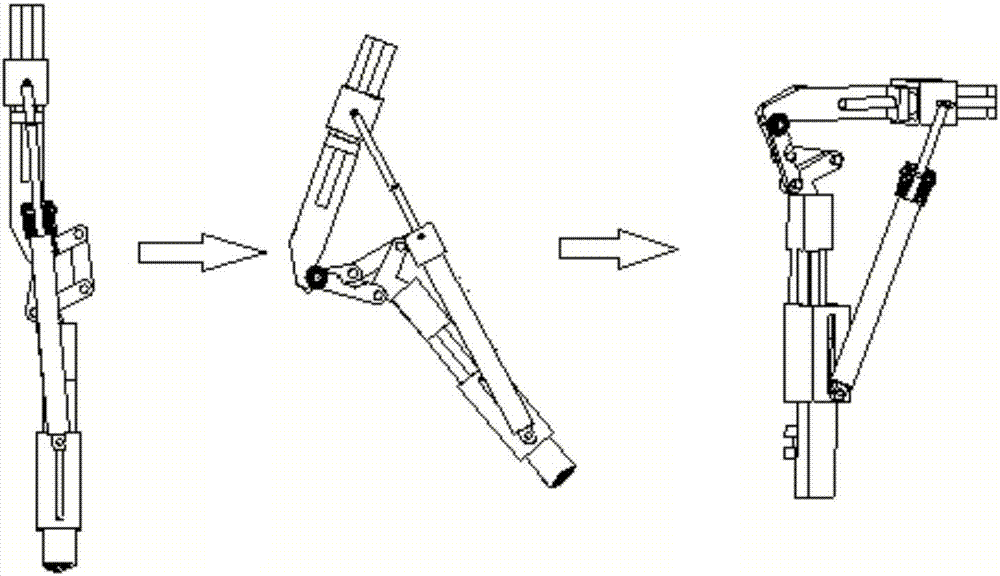
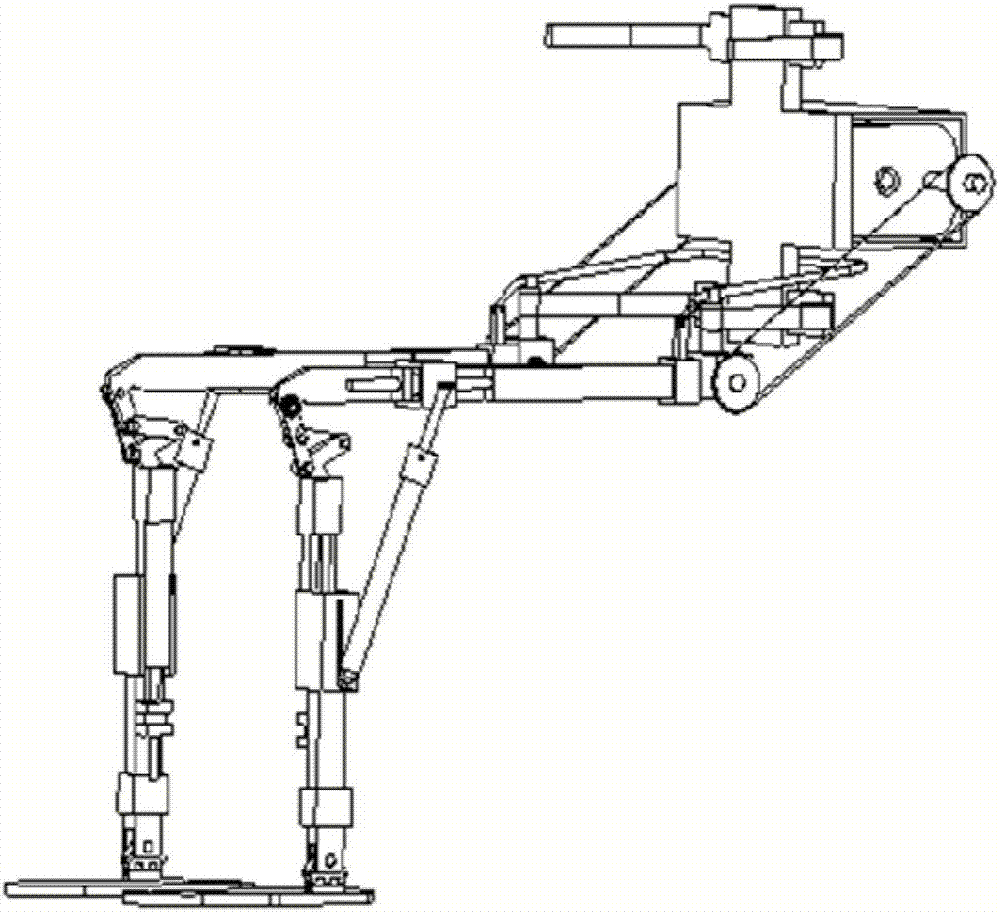
[0022] Such as Figure 1 to Figure 4 As shown, the present invention provides a knee joint structure for a lower extremity exoskeleton robot, including a foot plate 1, a lower leg assembly 2, a gas spring chute mechanism 3, a gas spring 4, a booster leaf spring 5, a four-link knee joint 6, Gas spring locking mechanism 7, thigh assembly 8, hip joint driving motor 9.
[0023] The shank assembly 2 and the thigh assembly 8 are connected by a four-bar knee joint 6, and a gas spring 4 is also installed between the shank assembly 2 and the thigh assembly 8. One end of the gas spring 4 is connected to the thigh assembly 8, and the other end is connected to the thigh assembly 8. The gas spring chute mechanism 3 fixed on the calf assembly 2 is slidably connected, and the gas spring 4 is used to realize power assisting when standing up to sitting down, and sitting down to stan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com