Quick and automatic target detection method
A target detection and target technology, applied in image data processing, instruments, character and pattern recognition, etc., can solve the problem of long calculation time, time domain and air domain do not meet the condition of optical flow continuity, and the inability to describe the overall UAV video frame Motion displacement and other issues, to reduce computational complexity and control computational time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
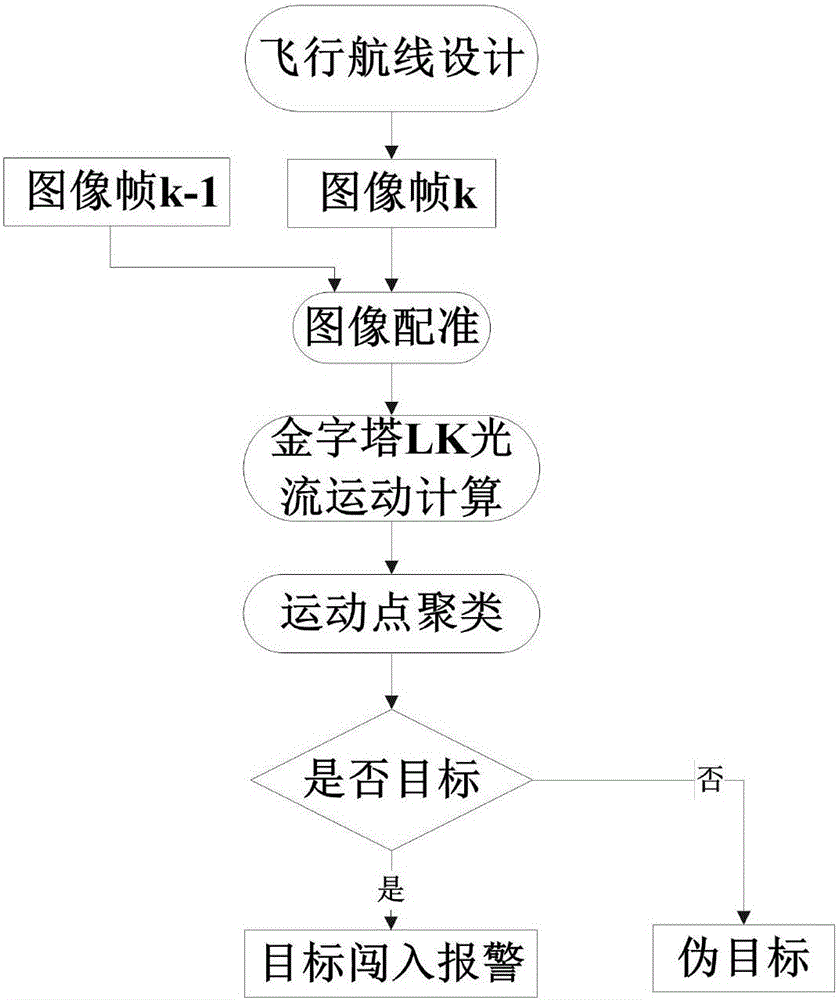
[0045] A fast automatic target intrusion detection method, the method is used for target detection of unmanned aerial vehicles, and the method performs Gaussian pyramid layering on the original images in the original video captured by the onboard camera of the unmanned aerial vehicle, to reduce the feature point extraction Computational complexity; Then extract image SIFT feature points for image registration, use pyramid LK sparse optical flow to capture motion information in the image to realize target point motion calculation, move point clustering and eliminate false targets, and finally perform target judgment to achieve Target Detection.
[0046] Such as figure 1 As shown, the method includes the following steps:
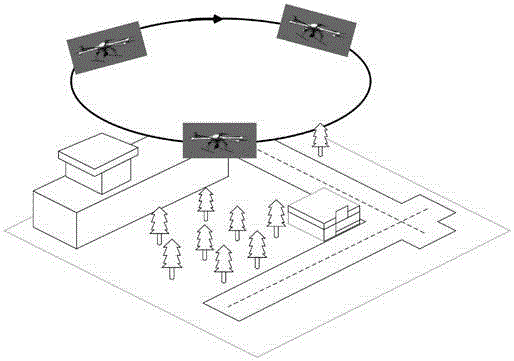
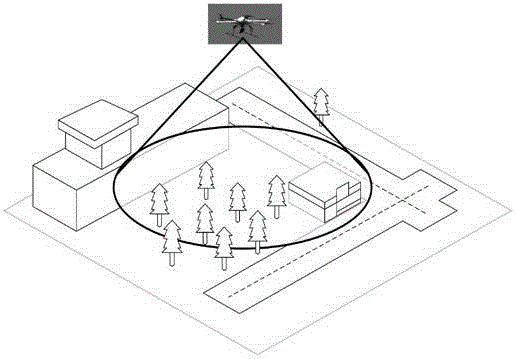
[0047] (1) Acquisition of original video: According to the inspection method of the drone on the monitoring area, set the position of the on-board camera to obtain the original video;
[0048] Such as figure 2 As shown, the inspection method includes two m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com