Method for estimating posture of robotic walking aid
A technology of robots and actions, applied in the direction of passive exercise equipment, appliances and instruments that help people walk
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
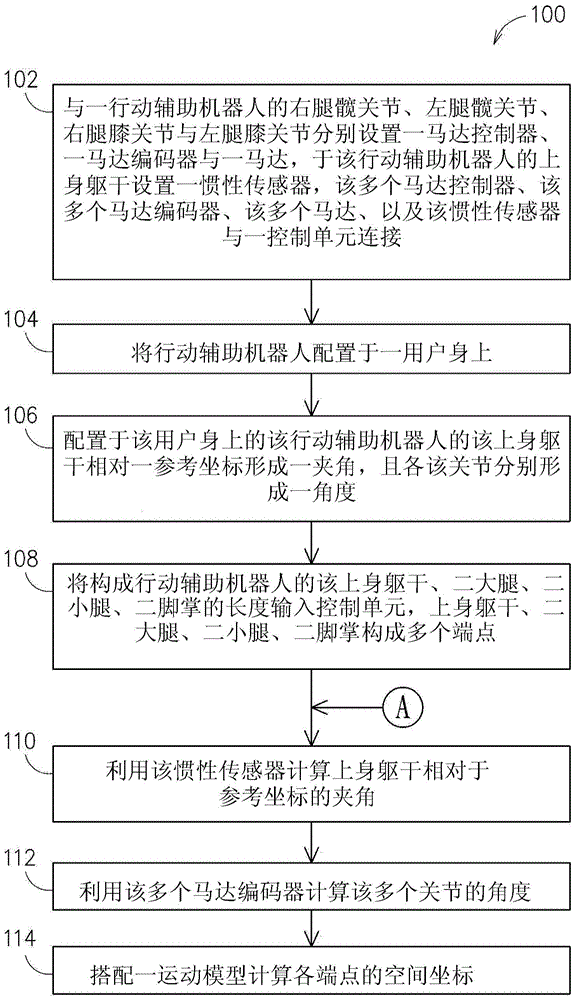
[0048] see figure 1 As shown, the posture estimation method 100 of an action-assisted robot proposed by the present invention includes:
[0049] Step 102: Install a motor controller, a motor encoder, and a motor on the right leg hip joint, left leg hip joint, right leg knee joint, and left leg knee joint of a mobility-assisting robot, and set them on the upper body of the mobility-assisting robot The torso is provided with an inertial sensor, and the plurality of motor controllers, the plurality of motor encoders, the plurality of motors, and the inertial sensor are connected to a control unit;
[0050] Step 104: disposing the mobility assistance robot on a user;
[0051] Step 106: The upper torso of the mobility assistance robot disposed on the user forms an angle with respect to a reference coordinate, and each of the joints forms an angle
[0052] Step 108: Input the lengths of the upper torso, second thigh, second calf, and second sole of the action-assisted robot into t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com