A slam method based on rodent model and rtab-map loop-closed detection algorithm
A closed-loop detection and animal model technology, applied in the field of bionics and machine vision, can solve the problems of not being able to meet the real-time requirements of closed-loop detection and low efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
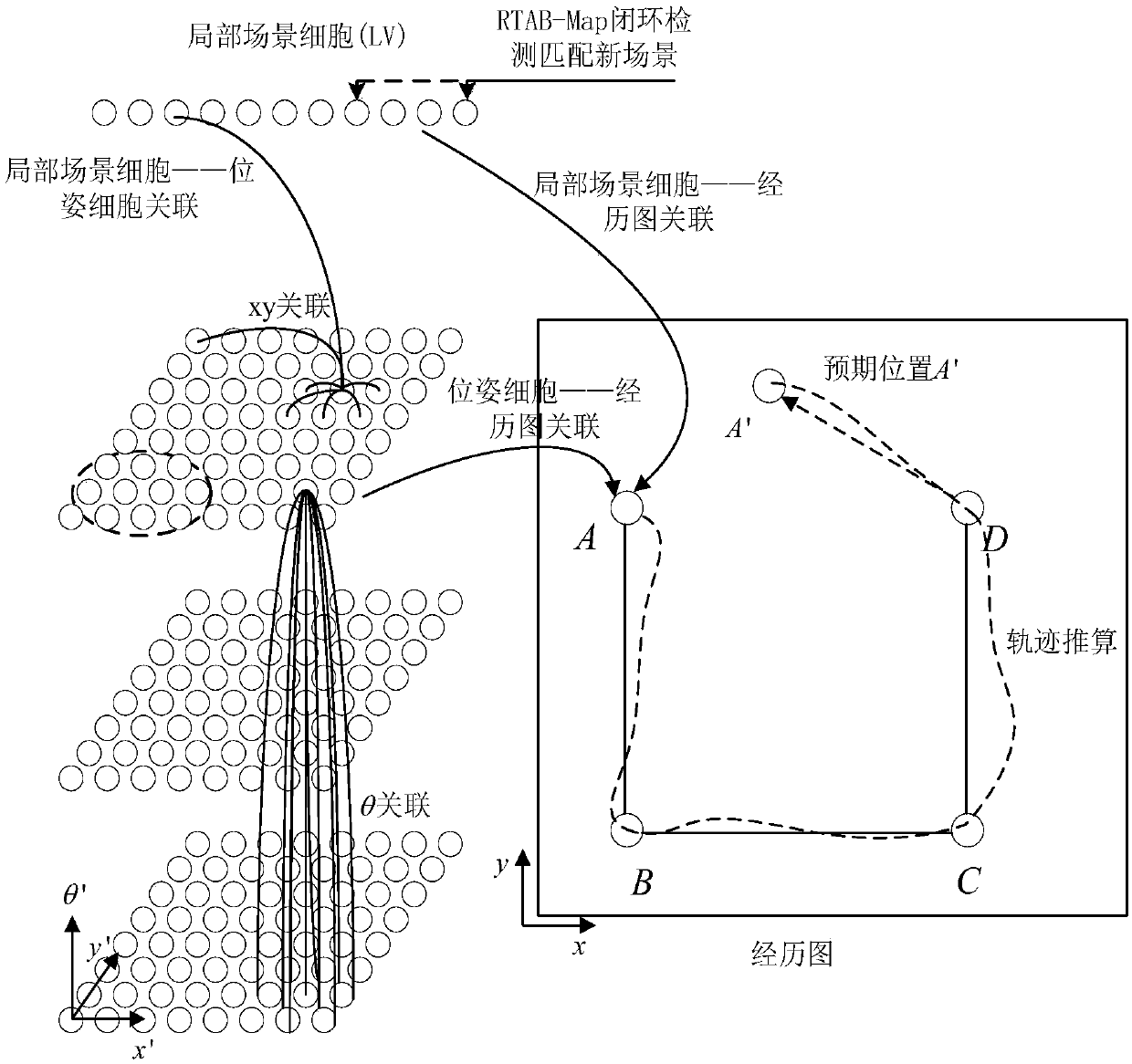
[0034] Such as figure 1 As shown, local scene cells learn unique scenes in the environment, pose cells formed by merging head direction cells and position cells represent the current position, and the topological experience graph encodes local scene cells and pose cells with nodes and links. The RTAB-Map loop closure detection algorithm uses the local scene cell activity of the RatSLAM system for scene relocation.
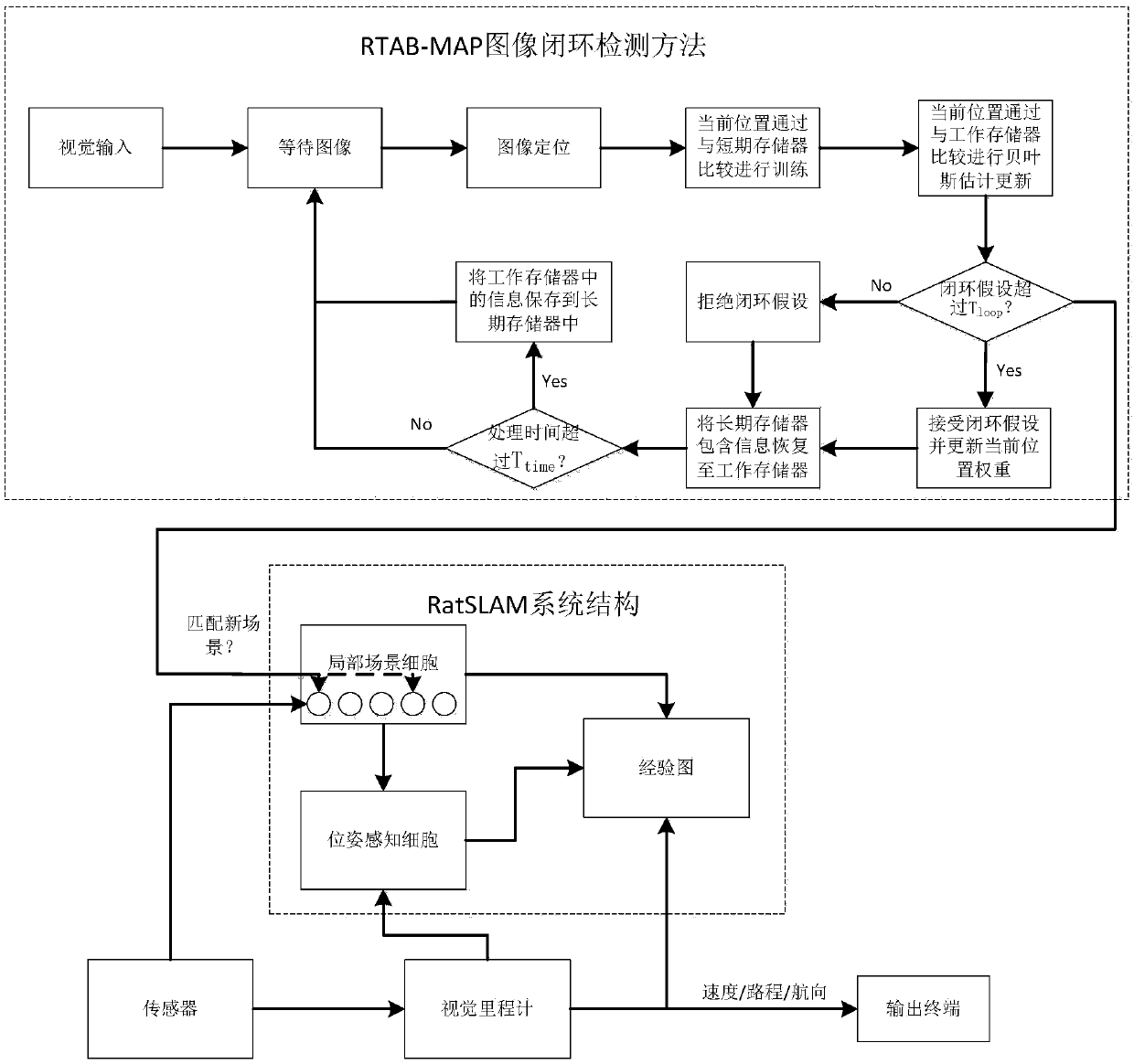
[0035] Such as figure 2 As shown, in the RTAB-Map image closed-loop detection method, the unfamiliar scene information is collected first. Since the continuous images captured have a large part of similar content, the continuous image information can be collected by setting the threshold to know the information contained in the current scene. information, store the words from the current position to a certain time in the past in the short-term memory STM, and select the word with the highest frequency of occurrence in the past time to store in the working memory ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com