Construction method of unmanned vehicle semantic map model and its application method in unmanned vehicle
A semantic map and construction method technology, applied in the field of unmanned vehicles, can solve the problems of low matching efficiency, difficult to express relationship, lack of semantic information, etc., to achieve the effect of assisting behavioral decision-making, improving efficiency, and avoiding traversal search.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
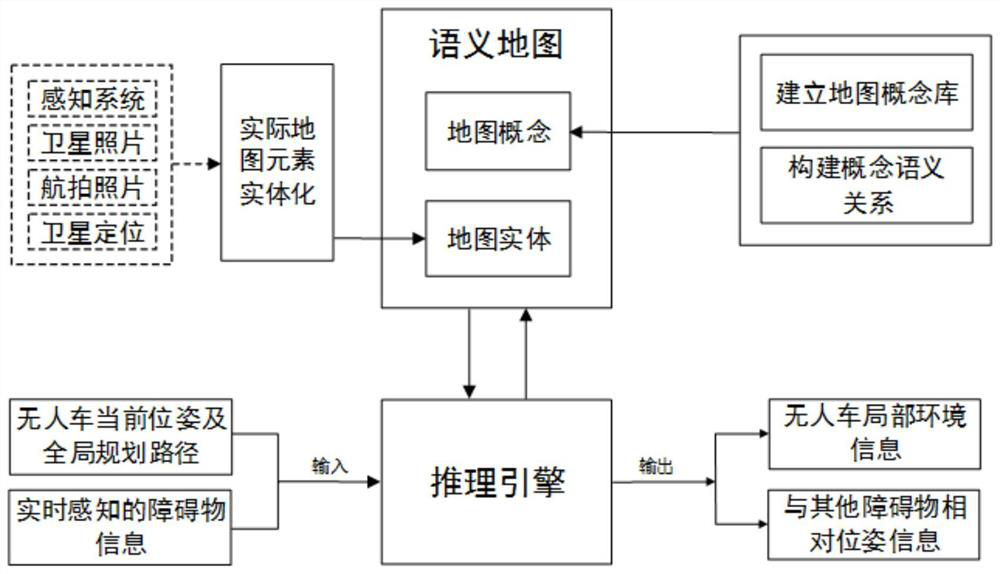
[0049] Such as figure 1 , as shown in 2, this embodiment provides a semantic map modeling method, including the conceptual structure of the semantic map, semantic relations, and a method for instantiating a real map to generate a semantic map.
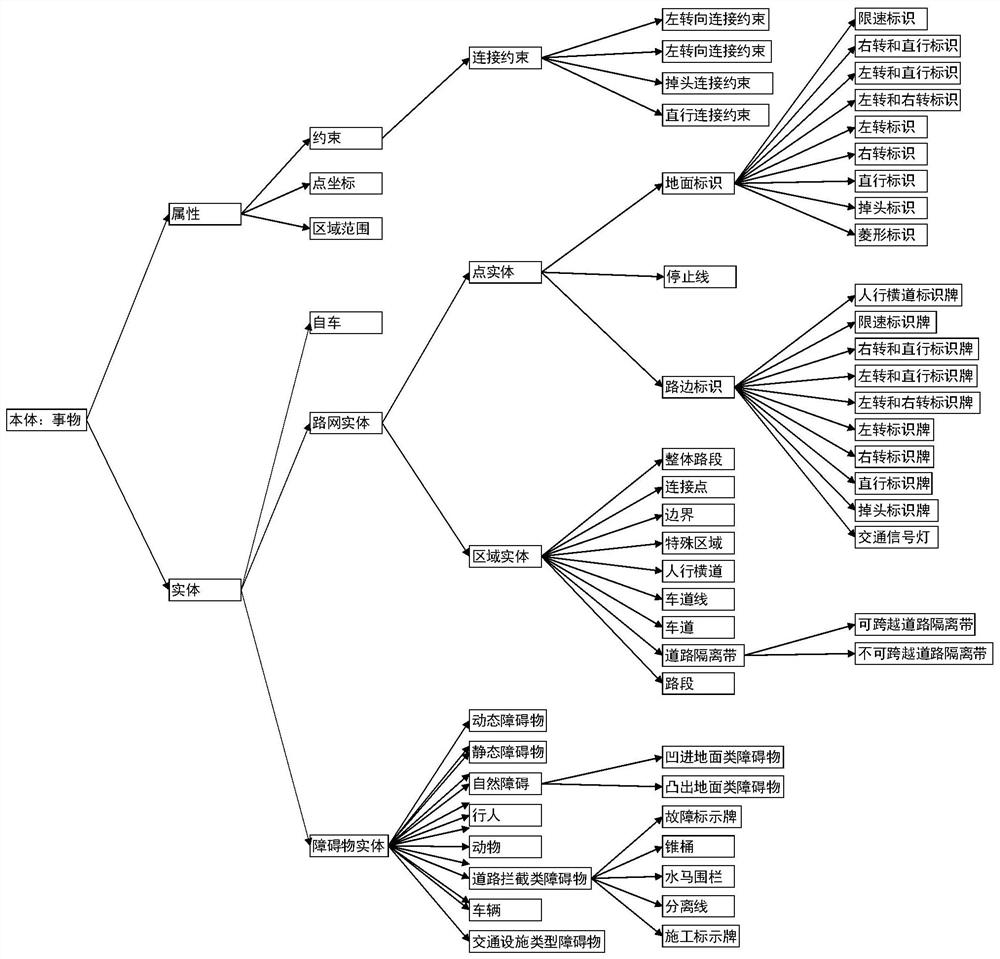
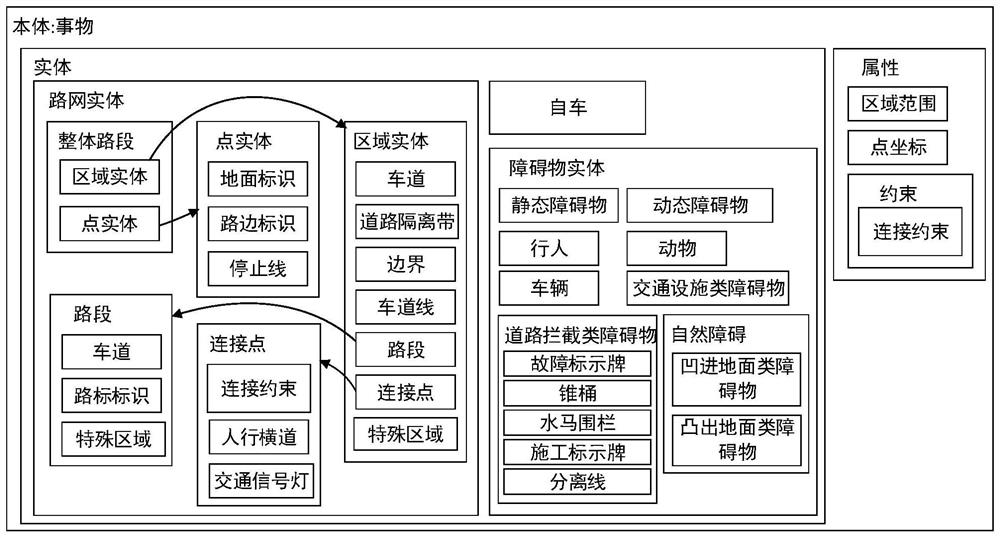
[0050] Such as image 3 As shown, the semantic ontology is divided into two modules: entities and attributes:
[0051] 1) Entities include self-vehicle, road network entity and obstacle entity, respectively representing the self-vehicle (unmanned vehicle) entity, road network element entity and obstacle entity.
[0052] 11) The self-vehicle refers to the unmanned vehicle itself, which can be expanded to different types of unmanned vehicles according to requirements.
[0053] 12) Road network entities include area entities and point entities, representing area type entities and point type entities respectively.
[0054] 121) Regional entities include overall road sections, connection points, boundaries, road barriers, special areas, ...
Embodiment 2
[0076] Such as Figure 8 As shown, its map semantic information is in Figure 7 , the red square represents the current position of the unmanned vehicle. The current unmanned vehicle is driving close to the connection point (the connection point may include intersections, U-turns, and areas where the number of lanes increases or decreases). Obstacle information, the relative pose of the unmanned vehicle is obtained through semantic reasoning, and on this basis, the unmanned Vehicle local scene information to assist unmanned vehicles to make behavioral decisions. Figure 8 Vehicle 002 is found to have an obstacle ahead (the distance to the obstacle is 7m, the speed of the obstacle is 0, and the moving direction of the obstacle is the same direction), and the vehicle 001 with the obstacle on the right front (the distance to the obstacle is 15m, the speed of the obstacle is 0, the moving direction of the obstacle is the same direction) and there is an obstacle vehicle 003 on th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com