Two-direction perception adaptive robot finger device with closed-ring flexible piece and control method of two-direction perception adaptive robot finger device
A technology of robotic fingers and flexible parts, which is applied in the direction of manipulators, manufacturing tools, chucks, etc., and can solve the problems of reduced finger grasping performance, generation of empty travel, and unsatisfactory grasping methods of underactuated fingers.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
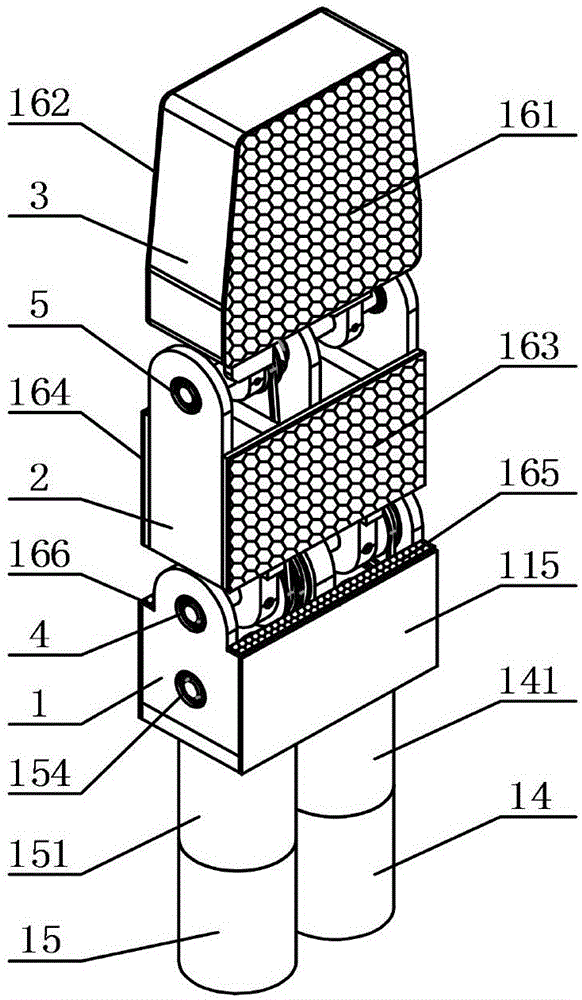
[0084] An embodiment of the closed-loop flexible part bidirectional perception self-adaptive robot finger device designed by the present invention, such as Figure 1 to Figure 11 As shown, the closed-loop flexible bidirectional sensing adaptive robot finger device includes a base 1, a first finger segment 2, a second finger segment 3, a proximal joint shaft 4, a distal joint shaft 5, a first motor 14, a second motor 15, The first stop sensor 161, the second stop sensor 162, the first contact sensor 163, the second contact sensor 164, the first parking sensor 165, the second parking sensor 166, the initial position sensor 167, the control module 121 and the motor drive module 122 . The first transmission mechanism, the second transmission mechanism, the first transmission wheel 6 , the second transmission wheel 7 , and the flexible transmission member 8 .
[0085] The first motor 14 is fixedly connected to the base 1 , the second motor 15 is fixedly connected to the base 1 , an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com