Internal driving method of three-wheel turning body of spherical robot
A spherical robot and internal drive technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of inflexible movement, low movement efficiency, and large monitoring capability limitations, and achieve the effect of flexible movement, light weight, and small limitations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
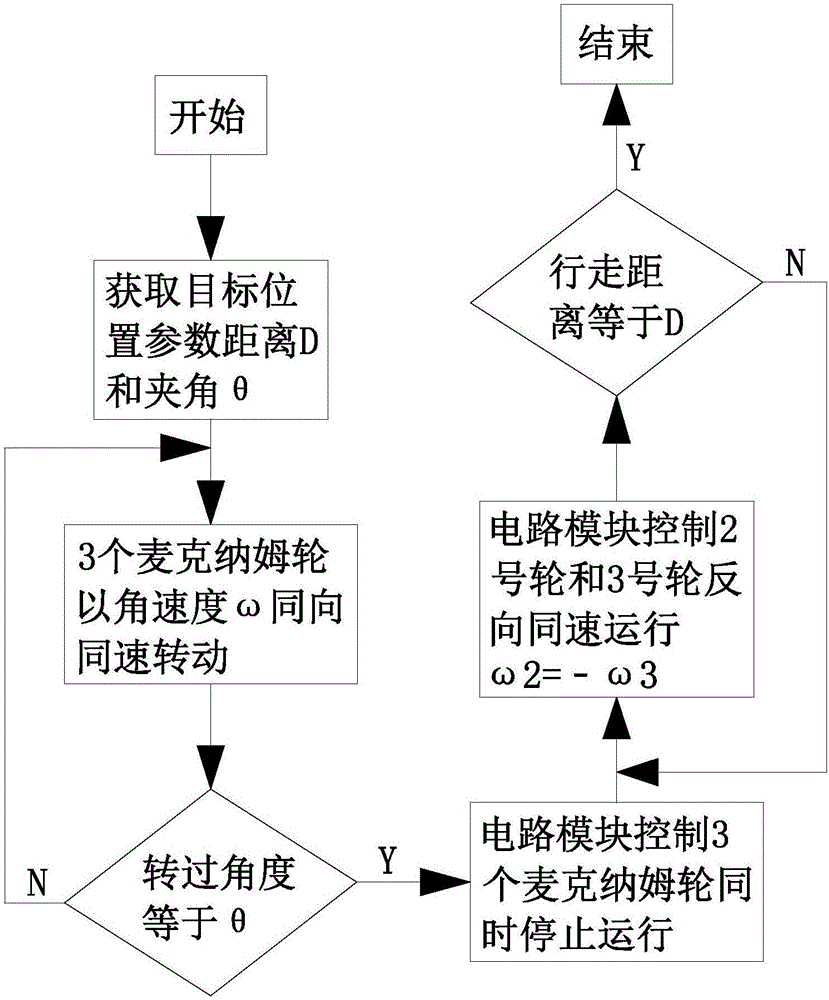
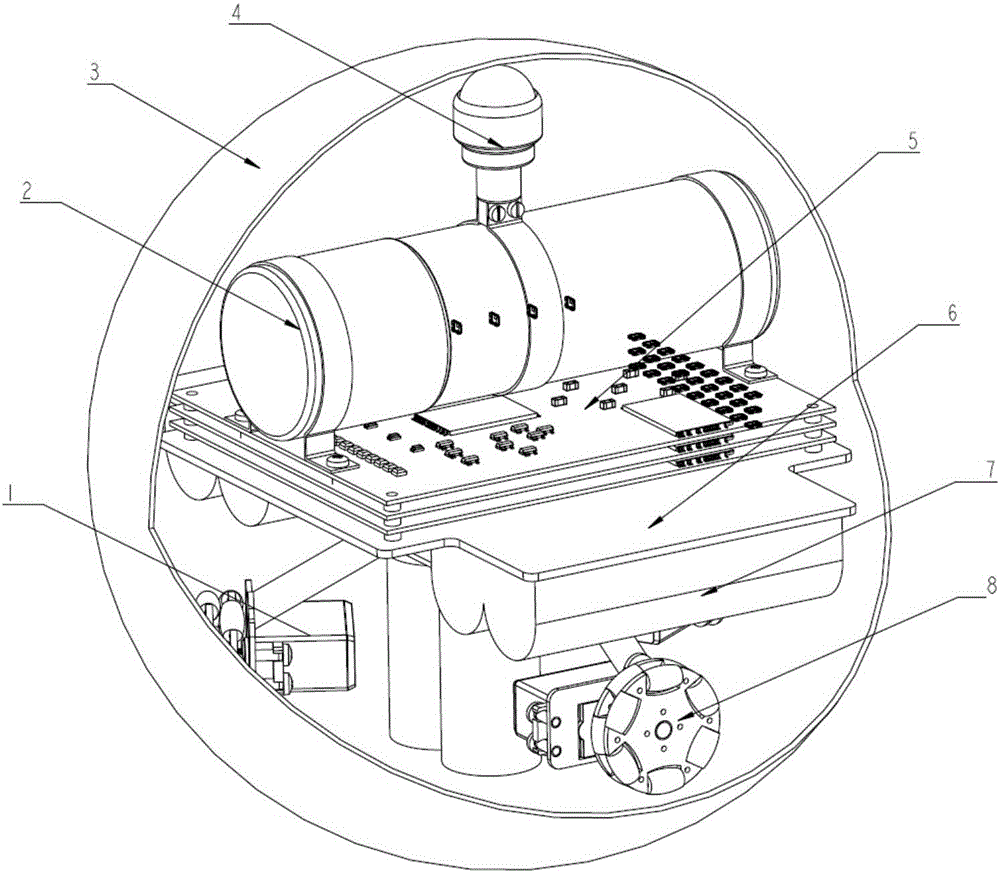
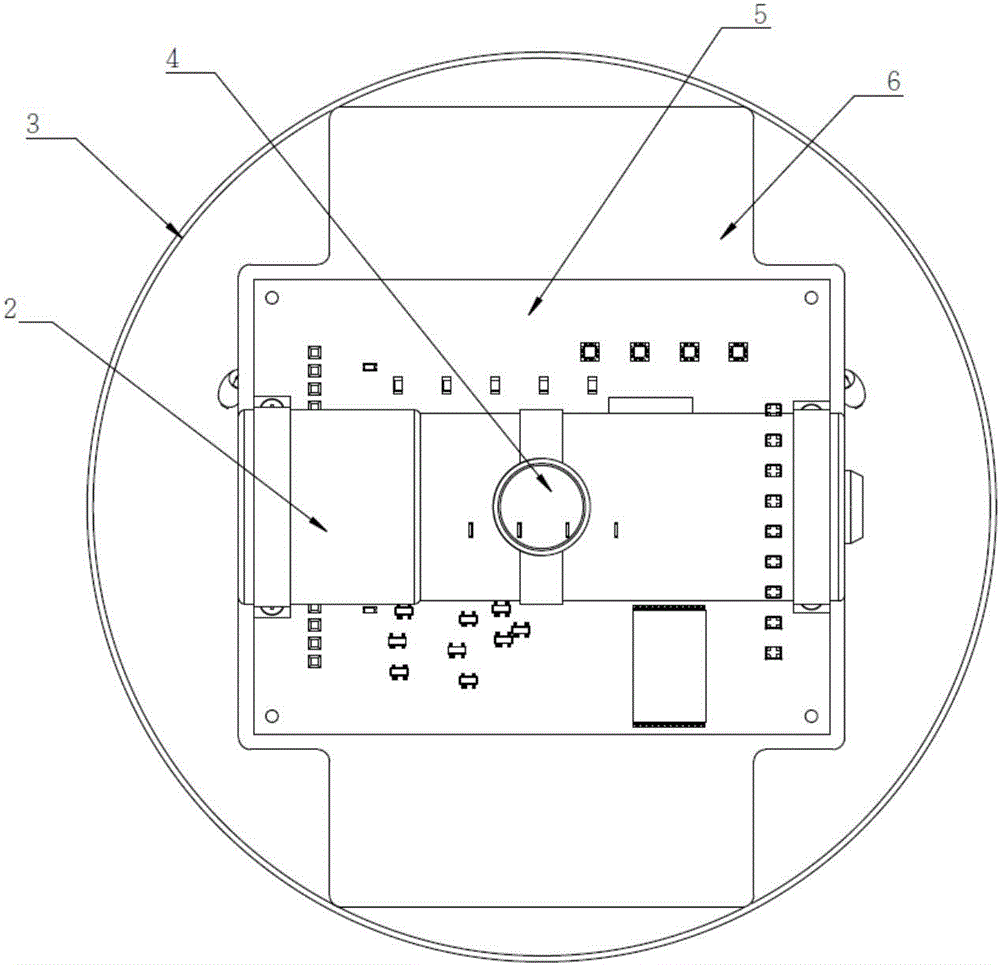
[0032] Such as Figure 1-3 As shown, a three-wheel rotating internal driving method of a spherical robot, the spherical robot includes a spherical housing 3, and a detector bracket 4, a detector 2, Circuit module 5, support plate 6, battery compartment 7 and driving device; described detector support 4 is provided with bull's-eye wheel, and described bull's-eye wheel faces upwards and slides contact with spherical housing 3 inner walls, and described battery compartment 7 has two One and symmetrically fixed on both ends of the lower side of the support plate 6, the center of gravity of the two battery compartments 7 combined with the support plate 6 is located directly below the spherical center of the spherical shell 3.
[0033] There are three driving devices and they are distributed on the same horizontal plane. The connecting lines of the three driving devices on the same horizontal plane form an equilateral triangle. The mecanum wheel 8 and the drive motor 1 fixed on the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com