Supercharge Your Innovation With Domain-Expert AI Agents!
Buffer energy saving and active anti-settling bionic mechanical foot
What is Al technical title?
Al technical title is built by PatSnap Al team. It summarizes the technical point description of the patent document.
A bionic machinery and subsidence technology, applied in the field of engineering bionics, can solve the problem of less research on active anti-subsidence
Active Publication Date: 2018-10-23
JILIN UNIV
View PDF9 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
The mechanical feet that have been researched are mostly considered from the aspects of support balance and cushioning, while there are relatively few researches on active anti-subsidence
In addition, most functions such as buffering and vibration reduction are assembled through springs, sleeves, etc., while rigid-flexible coupling applications such as material assembly and component assembly are relatively rare
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
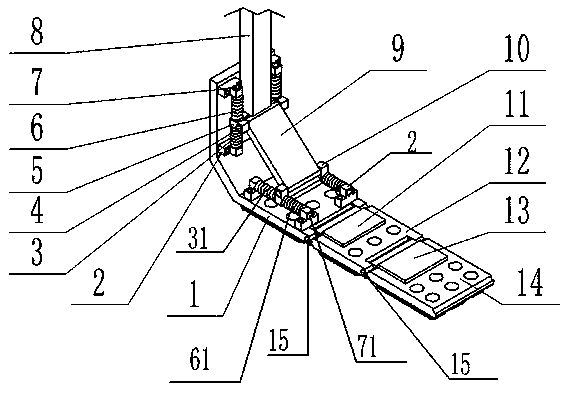
[0023] see figure 1 , figure 2 and image 3 As shown, the present invention includes the metatarsophalangeal joint, the tarsus metatarsal bone 8, the first steering gear 11, the second phalanx 12, the second steering gear 13, the third phalanx 14, the flange 15, the first toe pad 16, the second toe pad 17 and third toe pad 18;
[0024] The metatarsophalangeal joint consists of a base 1, a support 2, a vertical link 7, a horizontal link 71, a first vertical spring 3, a second vertical spring 6, a first horizontal spring 31, a second horizontal spring 61, a horizontal slider 10, The first phalanx 9, the vertical slider 5 and the pin shaft 4 are composed of four supports 2 installed on the vertical surface of the base 1, and the four supports 2 are distributed at the four corners of the vertical surface of the base 1, and the left and right sides are The upper and lower two supports 2 are equipped with vertical connecting rods 7, and each vertical connecting rod 7 is provided...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a buffering energy-saving and active anti-subsidence bionic mechanical foot. The foot is composed of a tarsometatarsus, metatarsophalangeal joints, a second phalanx, a third phalanx, a steering engine and a toe pad; each metatarsophalangeal joint is composed of a base, a support, a connection rod, a spring, a horizontal slider, a first phalanx, a vertical slider, a hinge pin and the like. Ostrich feet are used as a bionic prototype. On one hand, considering the motion morphology of sand touching and sand crossing of the ostrich feet when an ostrich runs on the sand land at high speed, the metatarsophalangeal joints which are permanently kept off the sand land are designed, and energy-storage, buffering and energy-saving effects are achieved; on the other hand, considering the aspect of material assembly, the phalanx adopts rigid materials, the toe pad adopts rubber materials, and rigid-flexible coupling plays a role in protecting a skeleton. Besides, considering the ostrich feet sand-off posture and active anti-subsidence characteristics, the steering engine drives the phalanxes to be off the sand land in sequence, and the active anti-subsidence effect is achieved. The bionic mechanical foot is simple in structure and multifunctional, and helps to improve the walking ability of a robot in the soft ground like sand land.
Description
technical field [0001] The invention belongs to the technical field of engineering bionics, and in particular relates to a bionic mechanical foot with buffering, energy saving and active anti-subsidence. Background technique [0002] With the development of mechanical design and control technology, robots have become a research hotspot. Countries have successively developed different robots, whose main applications include mineral mining, interstellar exploration, rescue and disaster relief, military reconnaissance and anti-terrorism. However, the environment that current robots face is mostly hard ground, and there are relatively few robots facing soft ground. As one of the actuators of robots, refined research has become particularly important. The quality of the foot design will have a profound impact on the balance, passability, and traction of the robot. The mechanical feet that have been researched are mostly considered from the aspects of support balance and buffer...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More