Underwater robot positioning system based on double-manipulator encircling pile column
An underwater robot and positioning system technology, applied in the direction of manipulators, underwater operating equipment, ships, etc., can solve problems such as low operating efficiency and safety, difficulty in precise operation, and low positioning reliability, so as to improve operating accuracy, The effect of improving positioning reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The purpose of the present invention will be further described in detail through specific examples below, and the examples cannot be repeated here one by one, but the implementation of the present invention is not therefore limited to the following examples.
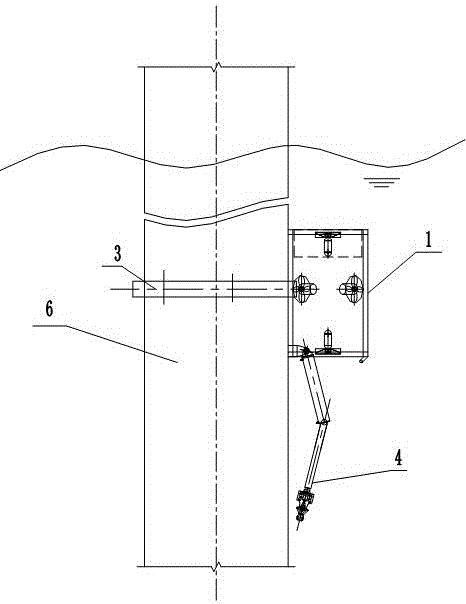
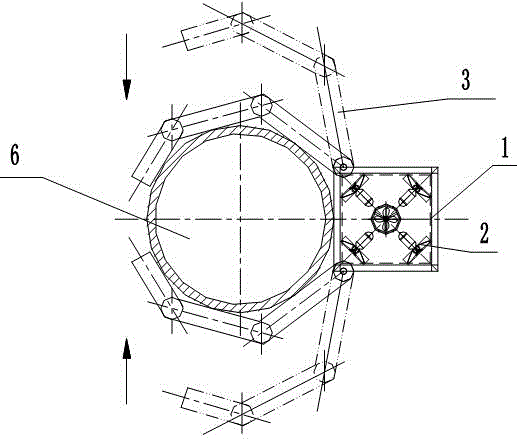
[0017] Such as figure 1 and figure 2 As shown, the underwater robot positioning system based on double manipulators embracing the pile includes a surface console and an underwater working robot 1 that can be adsorbed on the pile 6. The underwater working robot 1 is symmetrically arranged on both sides for holding The hydraulically embracing dual manipulators 3 of the pile 6, the surface console is connected to the underwater working robot 1 for signal control, and is used to control the actions of the underwater working robot 1 and the hydraulically embracing double manipulators 3.
[0018] The underwater working robot 1 includes a vacuum suction cup for absorbing piles 6, six propellers 2 arranged in vector, a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com